7 Operation
7.4.3 Acceleration/Deceleration Function
7-18
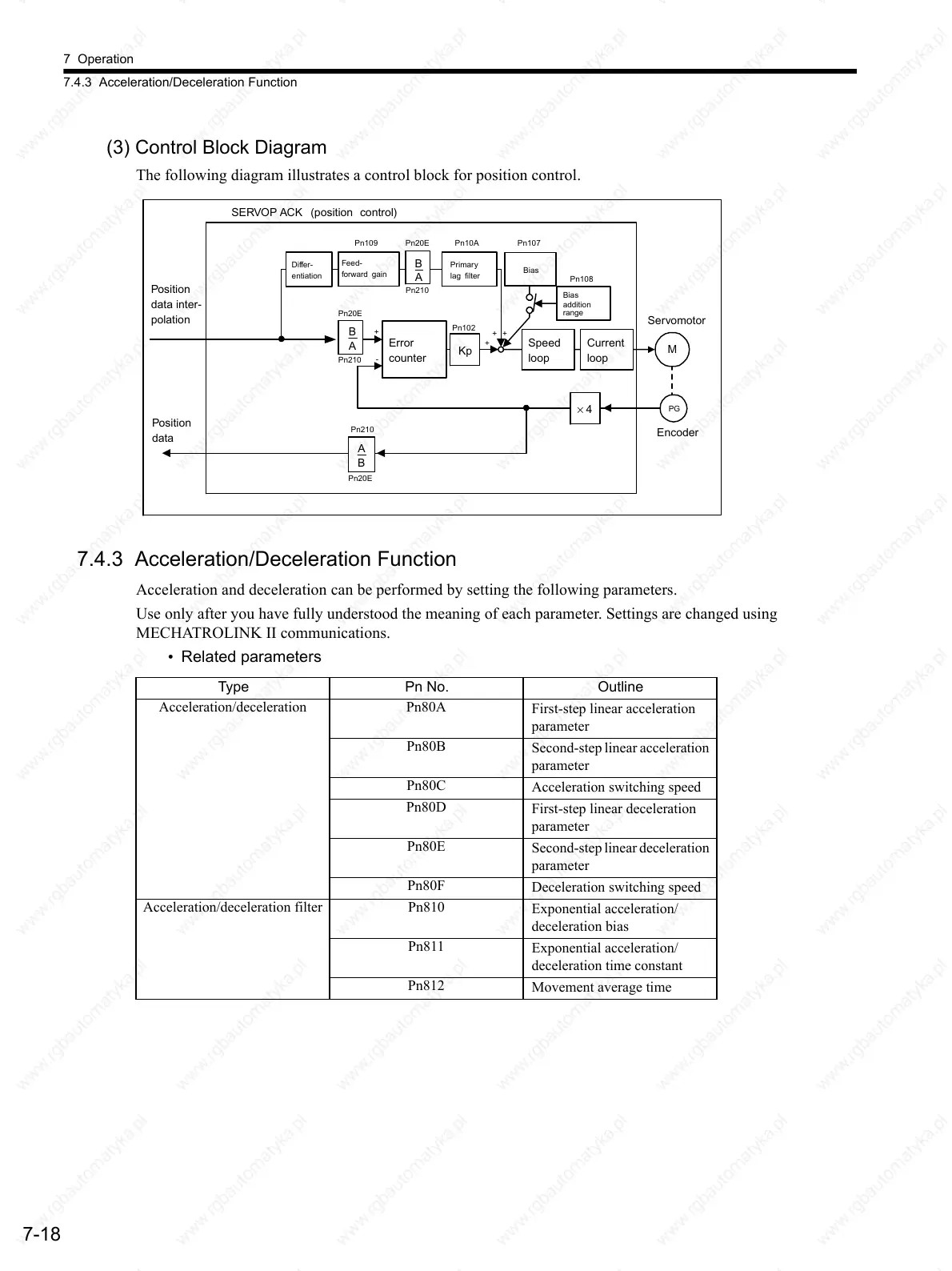
(3) Control Block Diagram
The following diagram illustrates a control block for position control.
7.4.3 Acceleration/Deceleration Function
Acceleration and deceleration can be performed by setting the following parameters.
Use only after you have fully understood the meaning of each parameter. Settings are changed using
MECHATROLINK II communications.
• Related parameters
Differ-
entiation
Error
counter
Kp
Feed-
forward gain
Primary
lag filter
Bias
Speed
loop
Current
loop
M
Pn210
Pn20E
Pn210
+
-
Pn102
Pn210
Pn20E
Pn10A
Pn107Pn109
Servomotor
PG
Position
data inter-
polation
SERVOP ACK (position control)
Encoder
Bias
addition
range
Pn108
B
A
B
A
+
++
Position
data
A
B
Pn20E
× 4
Type Pn No. Outline
Acceleration/deceleration Pn80A
First-step linear acceleration
parameter
Pn80B
Second-step linear acceleration
parameter
Pn80C
Acceleration switching speed
Pn80D
First-step linear deceleration
parameter
Pn80E
Second-step linear deceleration
parameter
Pn80F
Deceleration switching speed
Acceleration/deceleration filter Pn810
Exponential acceleration/
deceleration bias
Pn811
Exponential acceleration/
deceleration time constant
Pn812
Movement average time
 Loading...
Loading...

