4-46
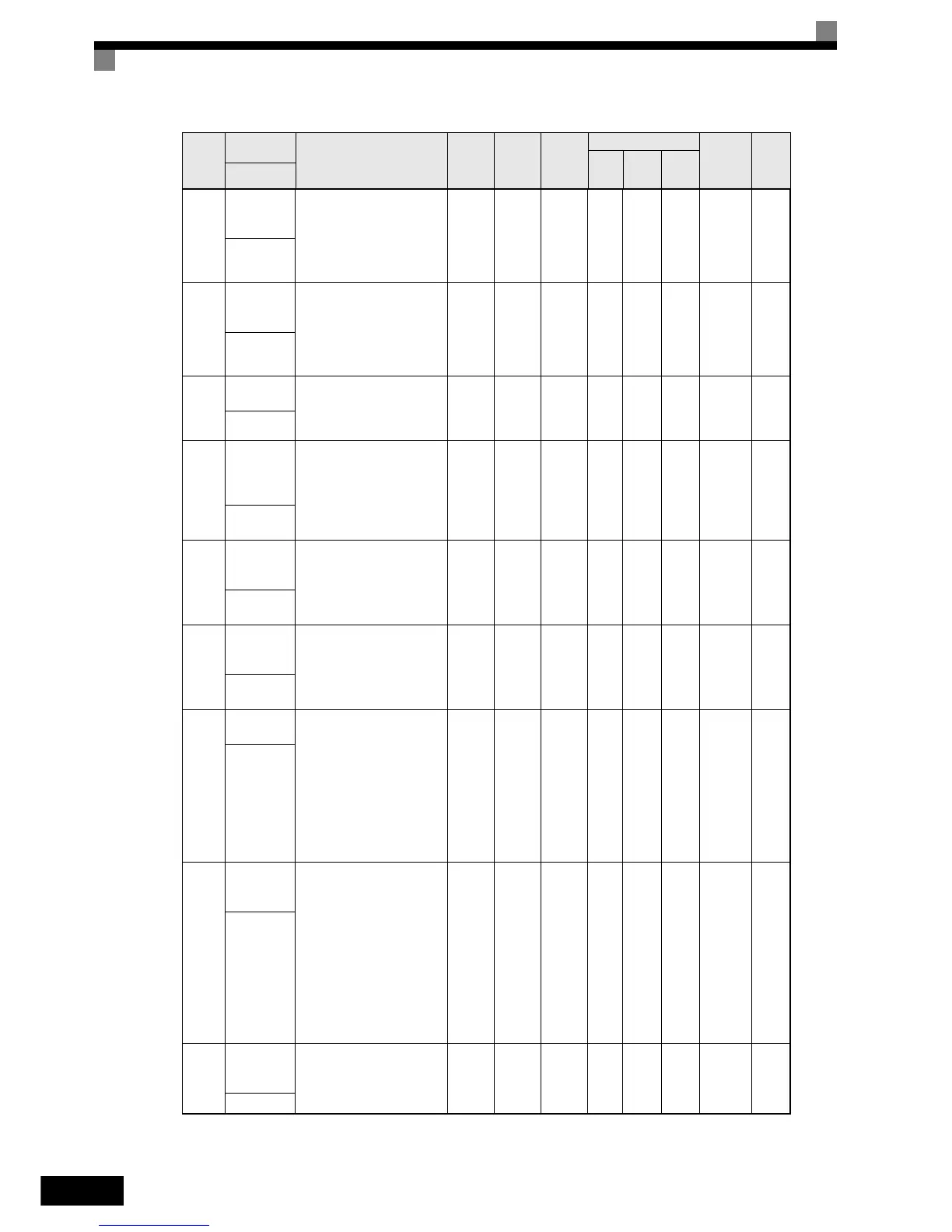
S1-14
SE2 detec-
tion delay
time
Used to set the time to detect
SE2 fault in units of 1ms.
When the inverter output cur-
rent is below S1-08 setting
after passing S1-06+S1-14
time,SE2 will be detected.
0
to
S1-04 -
S1-06
200ms No A A A 6A1H -
SE2 det T
S1-15
SE3 detec-
tion delay
time
Used to set the time to detect
SE3 fault in units of 1ms.
When Inverter output currnet
is below S1-08 setting for S1-
15 time continuously, SE3 will
be detected.
0
to
5000
200ms No A A A 6A2H -
SE3 det T
S1-16
RUN delay
time Used to set RUN-delay time in
unit of 1 second
0.00
to
1.00
0.10sec No A A A 6A3H -
Run Delay T
S1-17
DC injection
current gain
at regenera-
tion
Used to set the DC injection
gain when inveter is in the
regerenative mode.
0
to
400
100% No No A No 6A4H -
DC Inj
gain@gen
S1-18
DC injection
current gain
at motoring
Used to set the DC injection
gain when inveter is in the
motoring mode.
0
to
400
20% No No A No 6A5H -
DC Inj
gain@mot
S1-19
Output con-
tactor open
delay time
Used to set the delay time to
close the output contactor in
units of 1 second.
0.00
to
1.00
0.10sec No A A A 6A6H -
Cont open
delay
S1-20
Zero-servo
gain
Adjust the strength of the zero-
servo lock.
When the closed loop vector
control is selected, a position
control loop is created and the
motor stops at start or stop.
Increasing the zero-servo gain
in turn increases the strength of
the lock. Increasing it by too
much will cause oscillation.
0 to 100 5 No No No A 6A7H -
Zero Servo
Gain
S1-21
Zero-servo
completion
width
Sets the output width of the P-
lock completion signal.
The zero-servo completion sig-
nal is ON when the current
position is within the range
(the zero-servo position +
zero-servo completion width.)
Set the allowable position dis-
placement from the zero-servo
position to 4 times the pulse
rate of the PG (pulse generator,
encoder) in use.
0 to
16383
10 No No No A 6A8H -
Zero Servo
Count
S1-22
Torque com-
pensation
time at start
Sets the time to torque refer-
ence to reach to 300% torque
reference in units of 1ms.
0
to
5000
500ms No No No A 6A9H -
Torque incr T
Param-
eter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
Control Methods
MEMO-
BUS
Register
Page
V/f
Open
Loop
Vector
Closed
Loop
Vector
Display
http://nicontrols.com
 Loading...
Loading...










