5-12
Multi-function Digital Inputs (H1-01 to H1-05)
Multi-function Digital Outputs (H2-01 to H2-03)
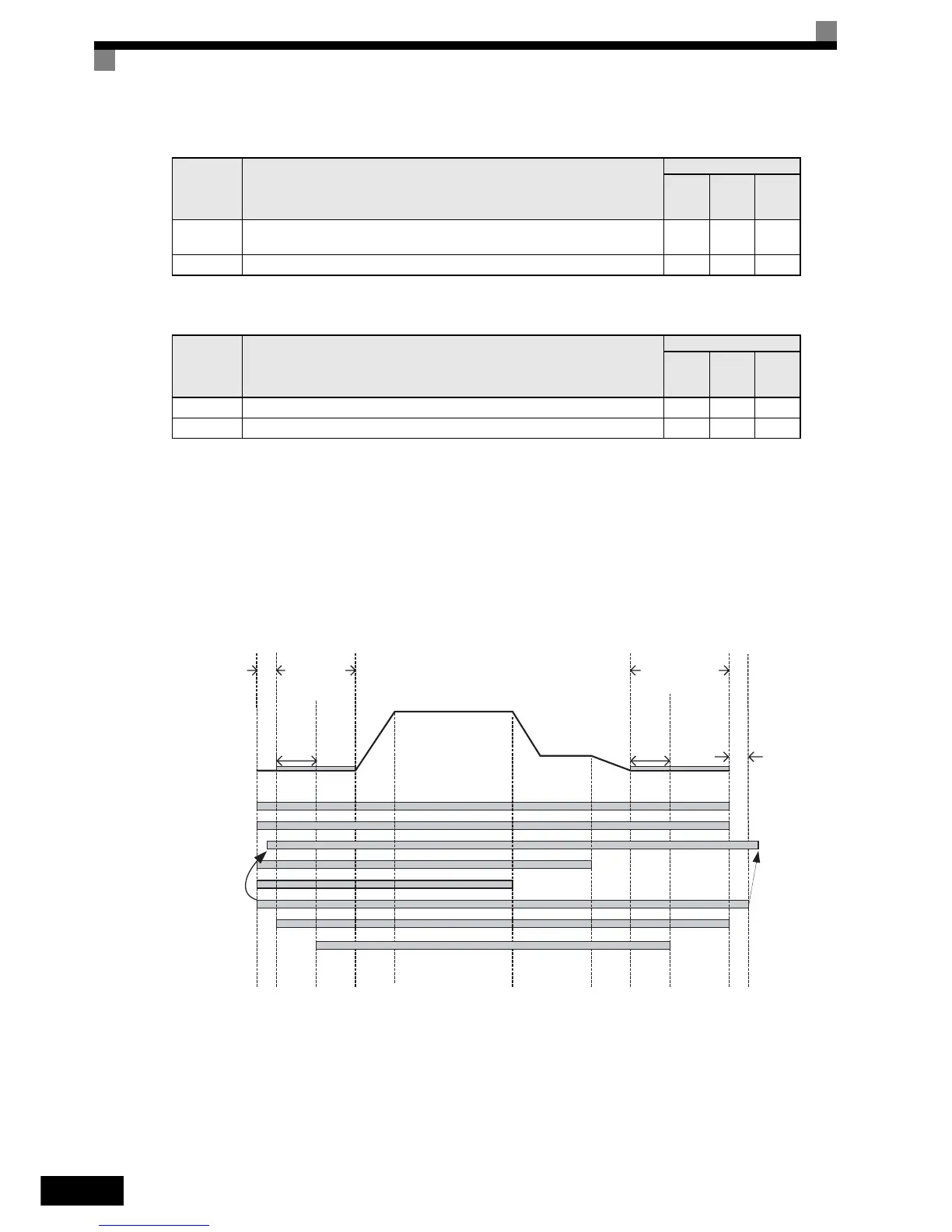
Brake Sequence without torque compensation at start
To use the brake sequence without torque compensation at start,
• the Terminal A1 function must be set to 0 (H3-15 = 0, speed reference input)
• the AI-14B Ch2 and Ch3 input functions must be set other than 14.(H3-05/09 ≠ 14, torque reference not
selected)
The figure below shows the timing chart for this breake sequence when high speed has priority and a leveling
speed input is selected.
Fig 5.3 Timing chart of Brake sequence without torque compensation at start
Set Value Function
Control Methods
V/f
Open
Loop
Vector
Closed
Loop
Vector
80 to 83
Speed selection inputs (refer to <Cross Ref 8>page 5-6, Speed Selection Sequence Using
Digital Inputs)
Yes Ye s Yes
86 Contactor closed answer back signal Yes Yes Yes
Set Value Function
Control Methods
V/f
Open
Loop
Vector
Closed
Loop
Vector
40 Brake release command Yes Yes Yes
41 Output contactor close command Yes Yes Yes
Up/Donw D/I
Leveling sped selection D/I
Selected speed (D/I)
Speed
DCInjection
zero servo
S1-04
DCInjection
zero servo
S1-05
Contactor Control D/O
Internal Run
Brake Control (D/O)
brake open
delay time
brake close
delay time
100 ms
Contactor confirmation D/I
Inverter Hardware BB (D/I)
stop
t0 t1 t2 t3 t4 t5 t6 t7 t8 t9 t10
S1-16
S1-06
S1-07
Contactor
open delay
S1-19
Selected Speed
Leveling
Speed
RUN Delay (200ms)
http://nicontrols.com