Rockwell Automation Publication 2097-UM001D-EN-P - November 2012 123
MotionView Software Configuration Chapter 5
Homing Method 34
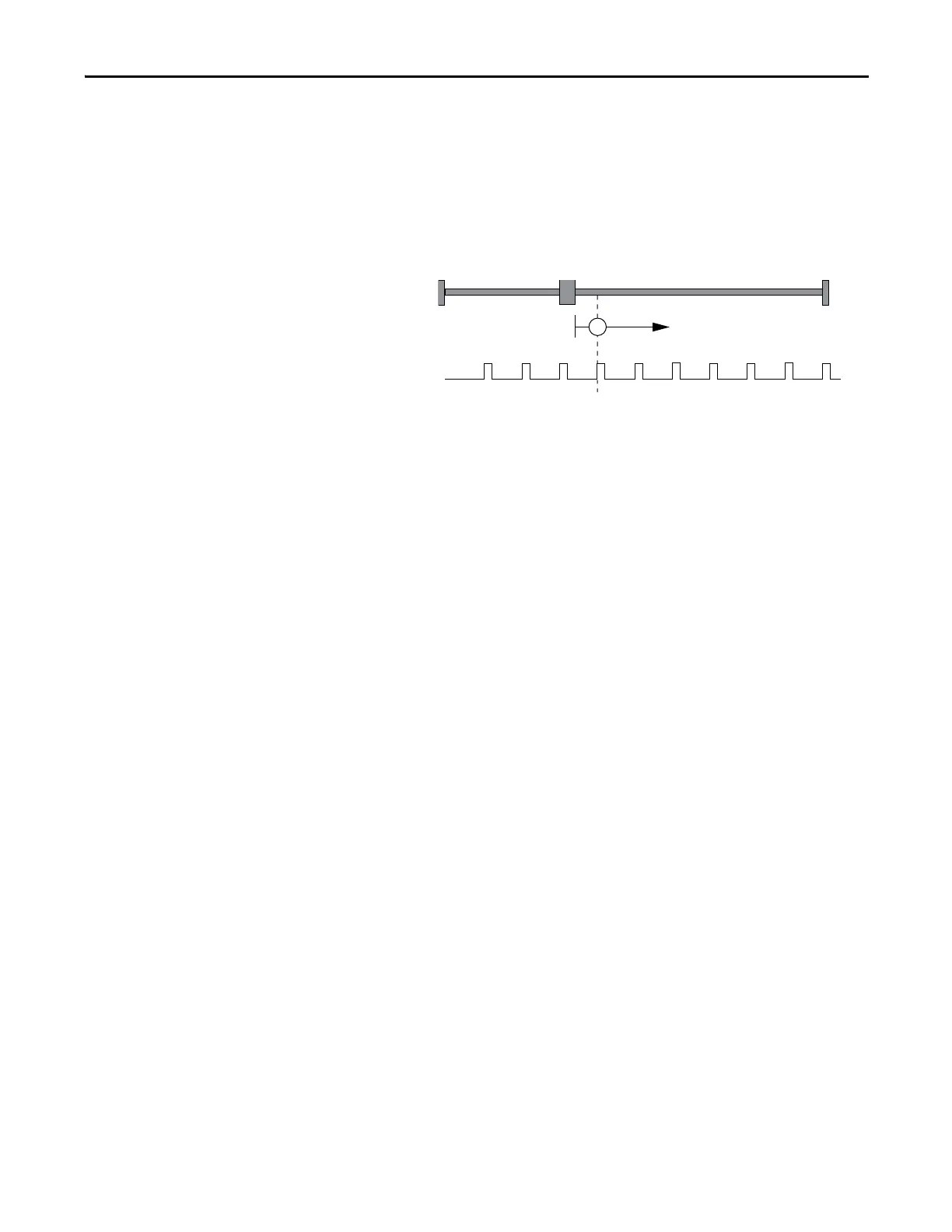
Using this method, the initial direction of movement is forward. The home
position is the first index pulse past the shaft starting position. The axis
accelerates to fast-homing velocity in the forward direction and continues until
the rising-edge of the first index pulse (position 34) is detected.
Figure 73 - Homing Method 34
Homing Method 35
Using this method, the current position is assumed to be the home position.
There is no motion of the motor shaft during this procedure. Any offset specified
is added to the stored home position.

 Loading...
Loading...






