156 Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 7 Troubleshooting the Kinetix 300 Drive System
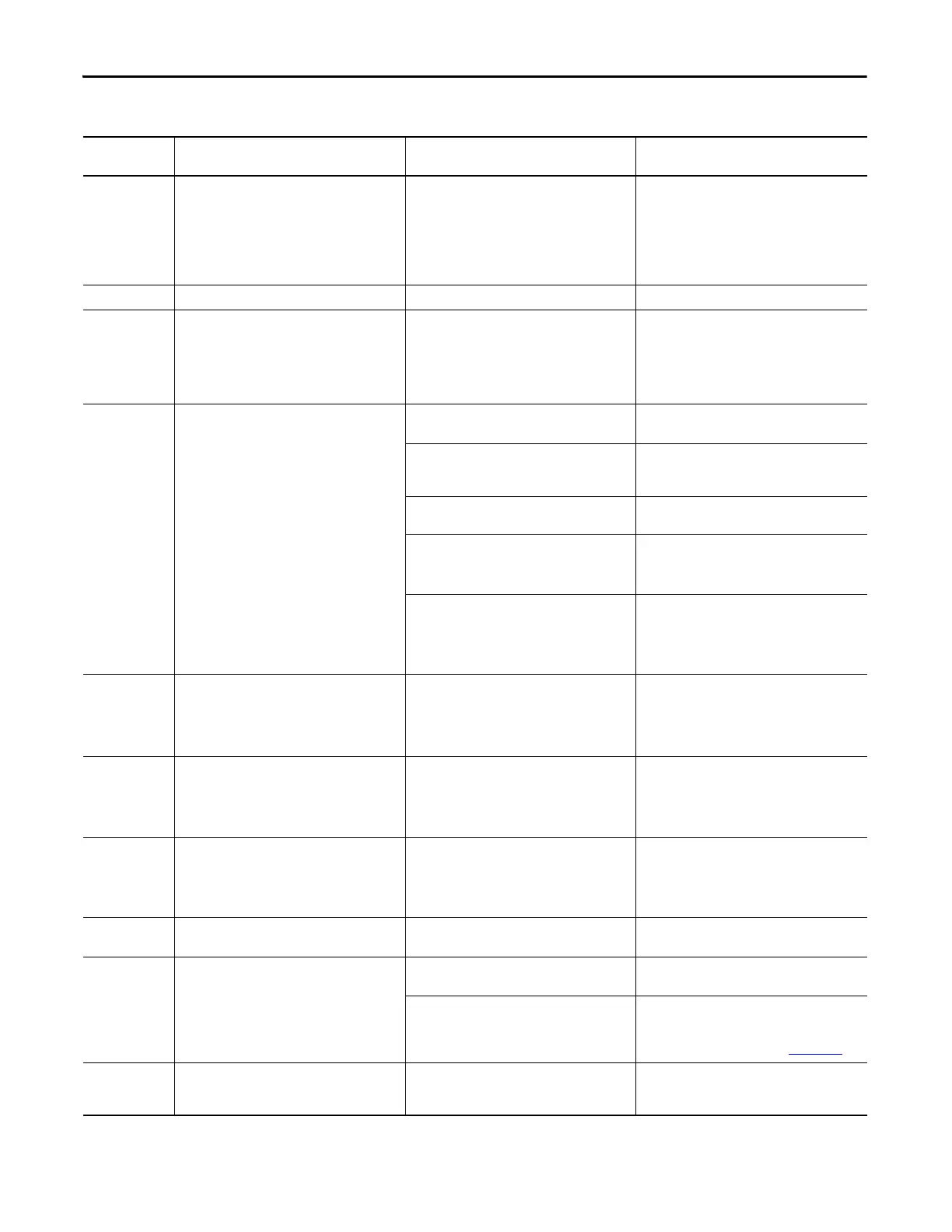
E67 Operating system failed. Hardware or configuration failure. • Cycle power.
• Check configuration settings to be sure that
drive tags setting are valid.
• Check your program to ensure there are not
explicit messages to internal drive variables
which have been noted as unpublished or
reserved.
E70 Memory module error. Bad memory module Replace memory module
E72 Drive temperature too high. The heat sink
temperature sensor has detects an
overtemperature condition.
Improper airflow/environmental temperature
exceeds specifications or an application anomaly .
Check for clogged vents or defective fan. Make sure
cooling is not restricted by insufficient space
around the unit. Check ambient temperature in
enclosure. Reduce acceleration rates. Reduce duty
cycle (ON/OFF) of commanded motion. Increase
time permitted for motion.
E74 Drive has exceeded peak current limit. Drive
cannot regulate current properly.
Motor cables shorted. Verify continuity of motor power cables and
connector.
Motor winding shorted internally. Disconnect motor power cables form the motor. If
the motor is difficult to turn by hand, it must be
replaced.
The machine duty cycle requires an RMS current
exceeding the continuous rating of the controller.
Change the command profile to reduce speed or
increase time.
Operation above continuous power rating and/or
product environmental rating.
Verify ambient temperature is not too high.
Operate within the continuous power rating.
Reduces acceleration rates.
The Kinetix 300 drive has a short circuit
overcurrent, or failed component.
Remove all power and motor connections and
preform a continuity check form the DC bus to the
U, V, and W motor outputs. If a continuity exists,
check for wire fibers between terminal or send
drive in for repair.
E76 Blank memory module. A Blank MEM module has been inserted into the
drive.
Push and hold the drive's enter key (bottom most
red button) on the drive's front display until the
drive shows "bUSY". This will make the drive
format the blank memory module for usage with
the drive.
E91 User watchdog has timed out. Ladder program error. • Not writing to WatchDogKick Tag frequently
enough to prevent timeout.
• Watchdog timeout period set to too low a value.
Increase timeout period or change controller
application to kick watchdog more frequently.
E92 Bad battery. • Tamagawa absolute feedback battery voltage
low or missing.
• A battery error is set at drive powerup when
main power to the encoder is not present or the
battery voltage is below 2.75V.
Replace battery.
E93 Motion set-up parameters calculate an acceleration
value above or below the drive capability.
Check indexing profiles or motion set-up profiles. Increase or decrease acceleration profile. Increase
or decrease permitted time for motion.
E94 Motor or motor feedback cable. Motor or feedback device malfunction. • Check motor power/feedback wiring.
• Replace motor or encoder.
Recommenced grounding, per installation
instructions, has not been followed.
• Verify grounding.
• Route feedback cables away from noise sources.
• See System Design for Control of Electric Noise
Reference Manual, publication GMC-RM001
.
E95 Wrong Indexing Mode Index Type or ReferenceSource not supported in
configured Linear/Rotary Unwind mode.
• Change the Index Type or ReferenceSource to
values that are supported by selecting Linear or
Rotary Unwind mode
Table 66 - Error Codes (continued)
Error
Code
Anomaly Possible Cause Action/Solution

 Loading...
Loading...






