9400200990 Rev I DGC-2020 BESTCOMSPlus Software 4-47
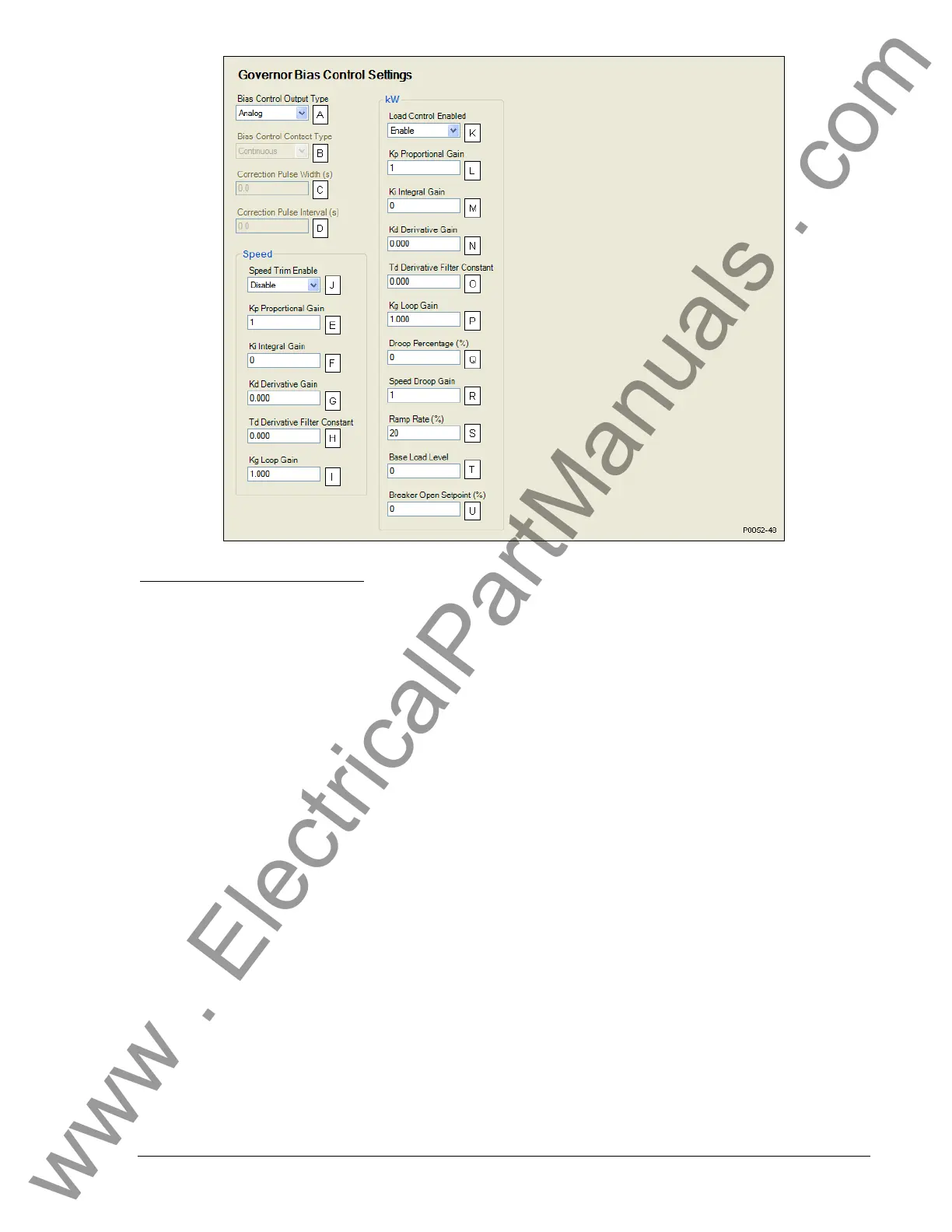
Figure 4-42. Governor Bias Control Settings
A
Bias Control Output Type: Contact or Analog.
B
Bias Control Contact Type: Continuous or Proportional.
C
Correction Pulse Width: Adjustable from 0 to 99.9 s in 0.1 s increments.
D
Correction Pulse Interval: Adjustable from 0 to 99.9 s in 0.1 s increments.
E
Proportional Gain (Kp): Adjustable from 0 to 1,000 in increments of 0.001.
F
Integral Gain (Ki): Adjustable from 0 to 1,000 in increments of 0.001.
G
Derivative Gain (Kd): Adjustable from 0 to 1,000 in increments of 0.001.
H
Derivative Filter Constant (Td): Adjustable from 0 to 1 in increments of 0.001.
I
Loop Gain (Kg): Adjustable from 0 to 1,000 in increments of 0.001.
J
Speed Trim Enable: Enable or Disable.
K
Load Control Enabled: Enable or Disable.
L
Proportional Gain (Kp): Adjustable from 0 to 1,000 in increments of 0.001.
M
Integral Gain (Ki): Adjustable from 0 to 1,000 in increments of 0.001.
N
Derivative Gain (Kd): Adjustable from 0 to 1,000 in increments of 0.001.
O
Derivative Filter Constant (Td): Adjustable from 0 to 1 in increments of 0.001.
P
Loop Gain (Kg): Adjustable from 1 to 1,000 in increments of 0.001.
Q
Droop Percentage: Adjustable from 0 to 10 percent in 0.001 % increments.
R
Speed Droop Gain: Adjustable from 0 to 1,000 in increments of 0.001.
S
Ramp Rate: Adjustable from 0 to 100 percent in 0.1 % increments.
T
Base Load Level: Adjustable from 0 to 100 percent in 1 % increments.
U
Breaker Open Setpoint: Adjustable from 0 to 1,000 in increments of 1.
PID Controller
The LSM-2020 suggested tuning method is as follows:
1. Set the Kp and Ki to zero and leave the Kg at the default level.
2. Increase Kp until there are continuous oscillations on the system being tuned (speed or voltage).
3. Reduce Kp until the oscillation stop (approximately 25%).
4. Introduce transients to the system being tuned and observe “ringing” in response to the transients.
5. Slowly increase Kd until the ringing is adequately dampened.
6. Slowly increase Ki until the steady state error in the system being tuned is eliminated.
www . ElectricalPartManuals . com