4
Communication Objects
30/79 ekr CON 600 net – Process Data Exchange via Profibus
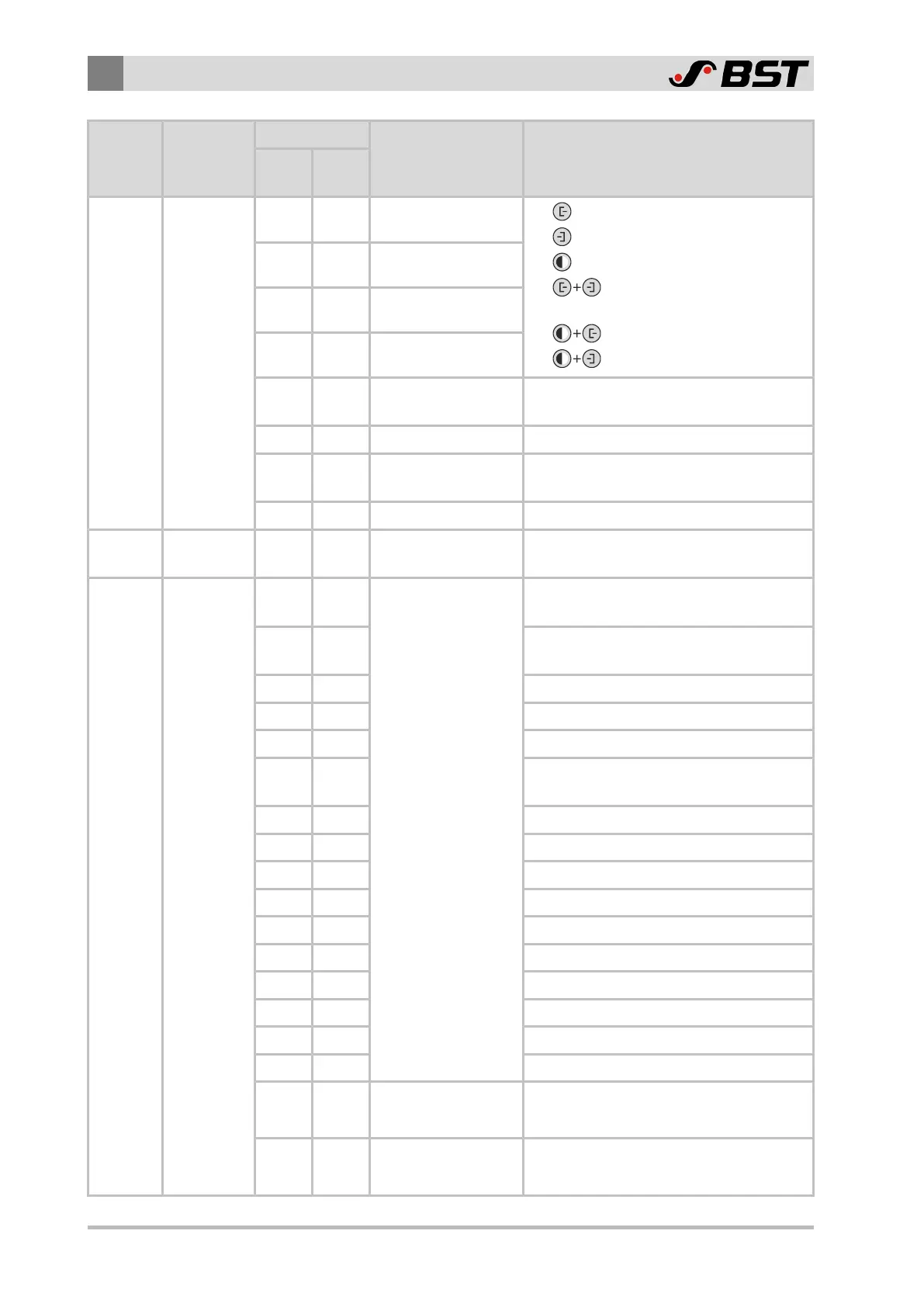
Name Data Type Bit Meaning Data Description
Little
Endian
Big
Endian
24 0 Guiding mode 1_4
1h: – Web edge guiding – Edge1
2h:
– Web edge guiding – Edge2
3h:
– Line/contrast guiding
5h:
– Web center-line guiding –
Center1&2
6h:
– Watchdog edge1
7h:
– Watchdog edge2
25 1 Guiding mode 2_4
26 2 Guiding mode 3_4
27 3 Guiding mode 4_4
28 4
Watchdog cannot be
switched on
29 5 Reserved
30 6
Web position
corrected (balanced)
31 7 Reserved
Status bit
field 2
Unsigned32 Reserved
Error field Unsigned32
0 24
Error bit field
Multiple errors can
be ored bitwise.
1h: Motor overcurrent
(rotating direction left)
1 25
2h: Motor overcurrent
(rotating direction right)
2 26 4h: Limit switch left side active
3 27 8h: Limit switch right side active
4 28 10h: Motor control timeout
5 29
20h: External motor output stage error
(Drive Module 160)
6 30 40h: Sensor configuration changed
7 31 80h: Sensor initialization error
8 16 100h: Sensor positioner error
9 17 200h: Not used.
10 18 400h: CAN bus configuration error
11 19 800h: CAN bus sync error
12 20 1000h: Voltage error (collective message)
13 21 2000h: Supply voltage more than 28 V
14 22 4000h: Supply voltage more than 32 V
15 23 8000h: Supply voltage below 16 V
16
…
23
8
…
15
Reserved
24
…
31
0
…
7
Reserved

 Loading...
Loading...