174
Type 8692, 8693
english
General Rules - Appendix
2.5 Implemented PID Controller
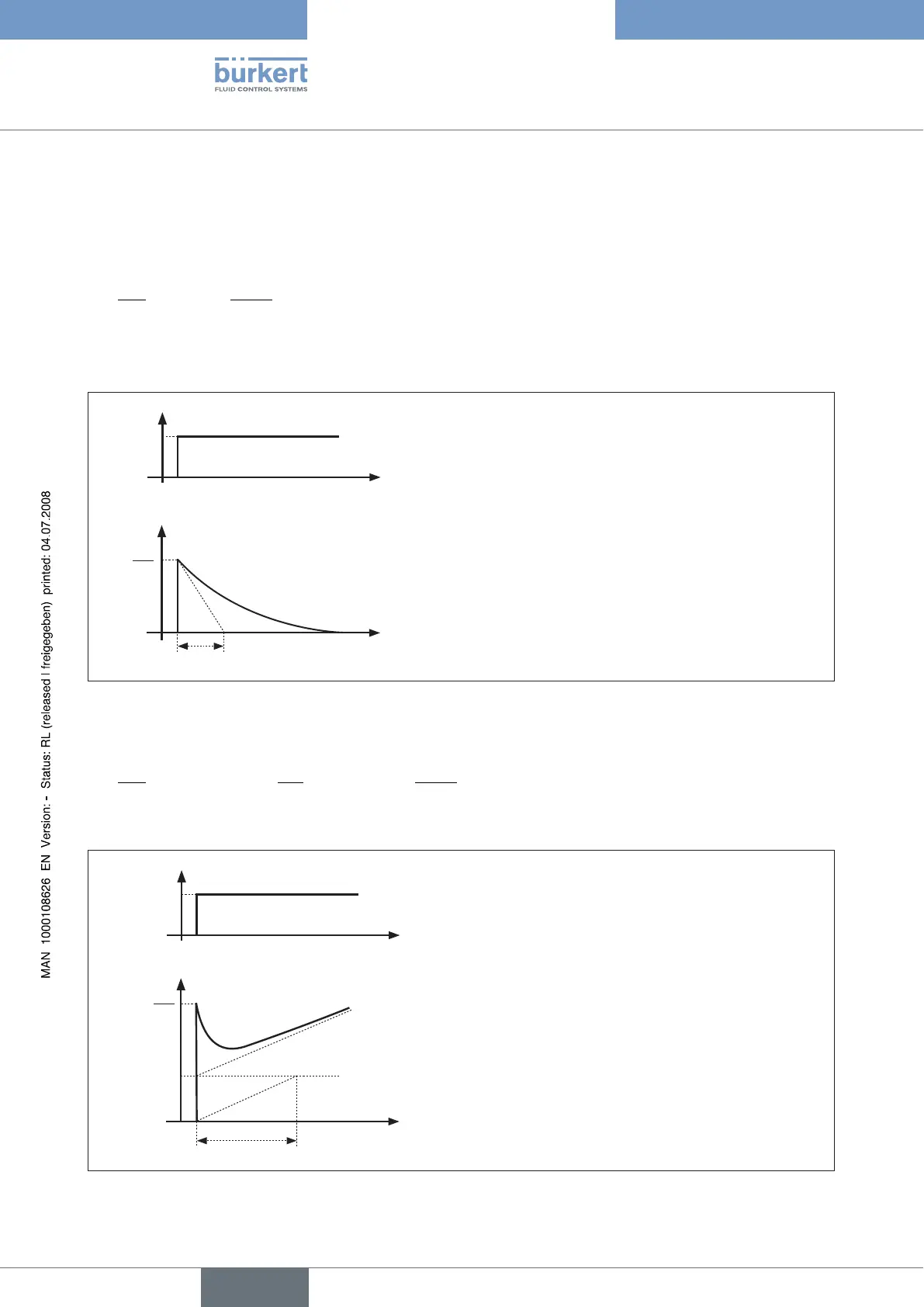
2.5.1 D Portion with Delay
In the process controller of the positioner the D portion is implemented with a delay T.
Function:
(9)
t d
d X d
dK Y
t d
Y d
T ⋅=+⋅
Superposition of P, I and DT Portions
X
Xd
Y
t
t
Xd
T
T
Fig. 5: Characteristic of superposition of P, I and DT Portions
2.5.2 Function of the Real PID Controller
(10)
t d
d X d
v Tt d d X
n T
1
d X ( pK Y
t d
Y d
T
∫
++=+⋅
Superposition of P, I and DT Portions
X
Xd
Y
t
t
Tn
Kp⋅Xd
Xd
T
Kp
Fig. 6: Characteristic of step response of the Real PID Controller