77
Type 8692, 8693
english
Start-up, operation
position controller Type 8692
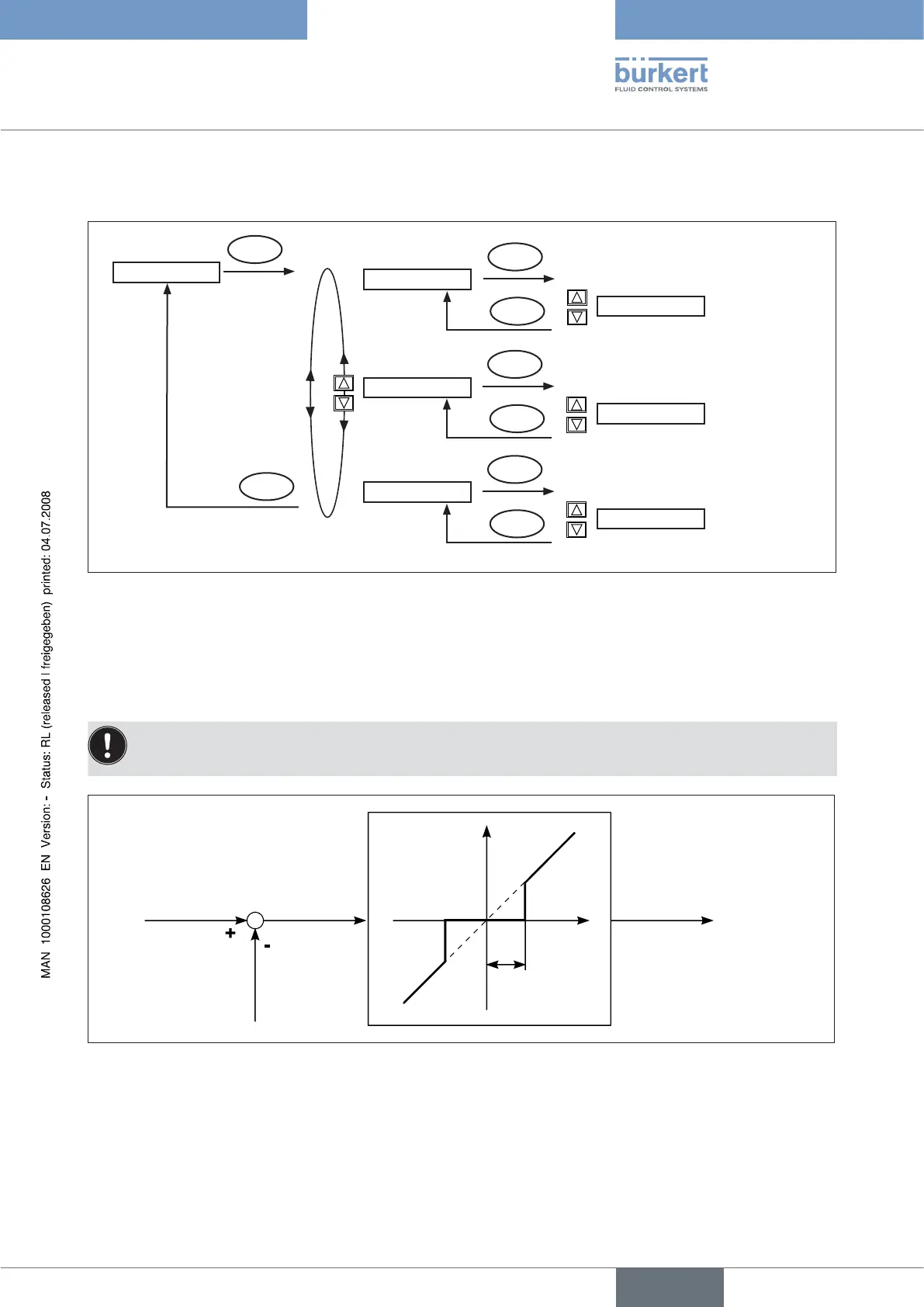
4.3.8 X.CONTROL
Parameterisation of the position controller
Use this function to set the parameters for the position controller (dead band and amplification factors).
X.CONTROL
DBND 1 %
KXopn 1
KXcls 1
EXIT
ENTER
INPUT
+
-
DBND 1 %
OK
INPUT
+
-
KXopn 0001
OK
INPUT
+
-
KXcls 0001
OK
*
*
*
Fig. 27: Operating structure X.CONTROL
DBND Insensitivity range (dead band) of the position controller
Input the dead band as %, relating to the scaled stroke range;
i.e. X.LIMIT Max - X.LIMIT Min (see Auxiliary function X.LIMIT).
This function causes the controller to respond from a specific control difference only. This function protects
the solenoid valves in the positioner and the pneumatic actuator.
If the auxiliary function X.CONTROL is in the main menu while X.TUNE (Autotune of the position controller) is running, the
dead band DBND is determined automatically depending on the friction behaviour of the actuator. The value determined
in this way is an approximate value. You can re-adjust it manually.
Position
set-point value
Control
difference
Xd1
Position
actual value
to the controller
Xd1‘
Dead band
Xd1
Xd1‘
Fig. 28: Graph X.CONTROL
KX XXX Parameters for the position controller
KXopn
Amplification factor of the position controller (for closing the valve)
KXcls
Amplification factor of the position controller (for opening the valve)