7-MAINTENANCE
“Return-to-dig”system-2WS
Returntodigisanelectricallyactivatedfeaturewhich
enablestheoperatortoautomaticallyreturnthebucket
toaleveldiggingpositionforafurtherworkcyclewith
onesimplemovementoftheloadercontrollever(3).
Wheneverthebucketisrolledforwardtodumpthere-
turn-to-digelectricalcircuitiscompletedandthesole-
noidonthebucketspoolisenergized.
Whentheloaderbucketcontrollever(3)ismoveddi-
agonallylefttothereturn-to-digposition(2)theelectro-
magnetwillholdthebucketspoolintherollbackpo-
sitionuntilthebucketisintheleveldiggingpositionat
whichtimetheindicatorontherodofthebucketself-
levellinglinkagewillpassinfrontofthesensorwhich
de-energizestheelectromagnetonthebucketspoolen-
ablingthespooltoreturntotheneutralposition.
MOLI12LBB0503BB4
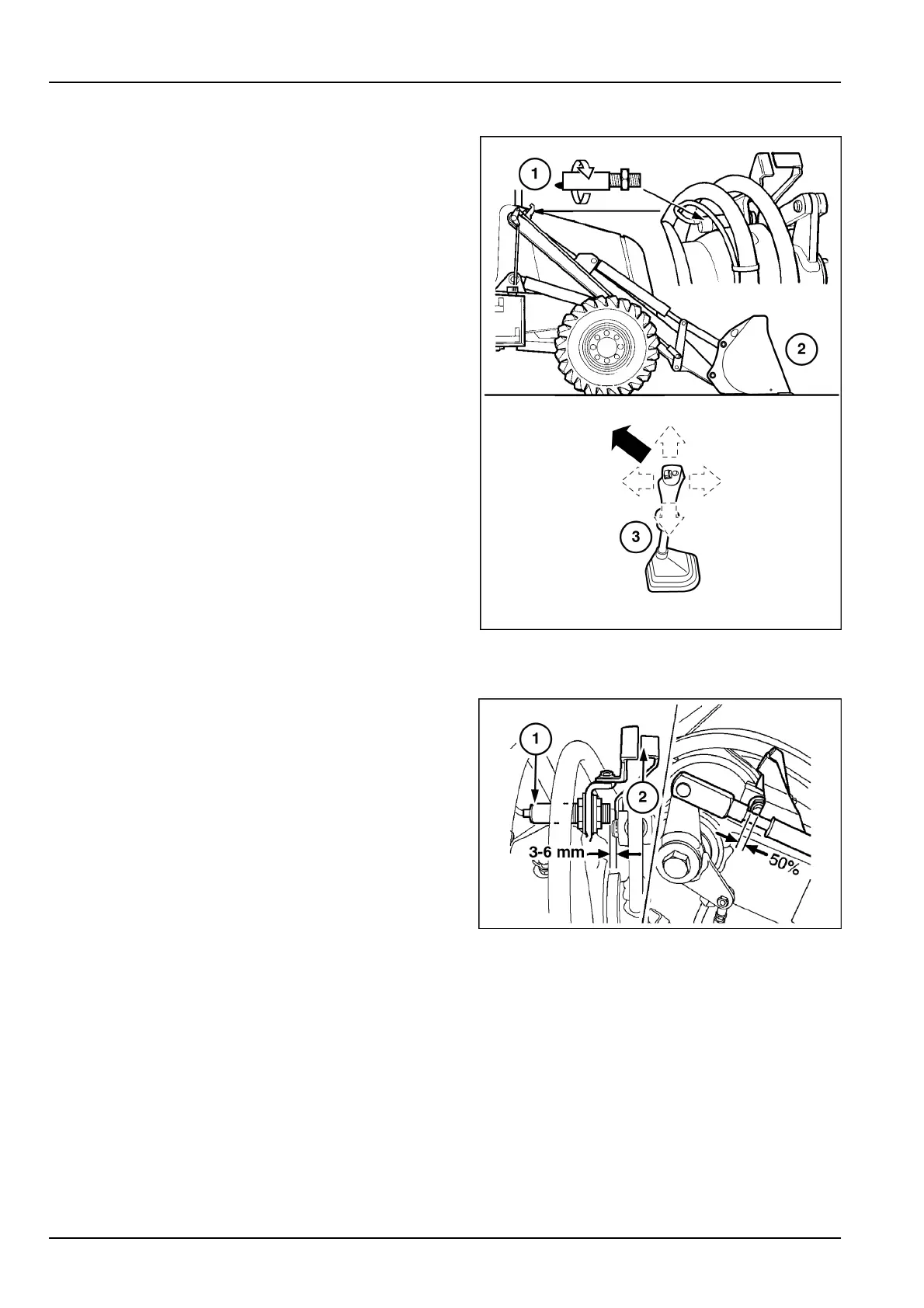
Return-to-digsensor-adjustment
1.Thereturntodigsystemconsistsofanelectromagnet
mountedonthebucketspool,asensor(1)mountedon
topoftheloaderarmandapointerattachedtothetube
ofthebucketself-levellinglinkage.
2.Placethebucketonthegroundinthepreferreddigging
position.
3.Adjustthepositionofthesensorsuchthatwhenthe
bucketisindiggingpositionandloaderarmsarelow-
ered,half(50%)ofthesensorfaceisobscuredbythe
self-levellinglinkagepointer.
4.Ensurethatthefaceofthesensor(1)is3-6mm(0.12
-0.24in)fromthepointer(2)ontheself-levellinglink-
age.
MOLI12LBB0504AB5
NOTE:Asavisualaidfortheoperator,whileseatedinthecab,thepointermountedontheloaderarmcanbeseen
toalignwiththepointerontheself-levellinglinkage,whentheloaderarmsareloweredandthebucketisinthelevel
diggingposition.
7-136