7-MAINTENANCE
Loaderbucket-self-levelingadjustment(Bentarm)
Modelswithoutstraightloaderarm
The“return-to-dig”deviceisanelectricallyactivated
featurewhichenablestheoperatortoautomatically
returnthebuckettoaleveldiggingpositionforafurther
workcycle,withonesimplemovementofthecontrol
lever(3).
Wheneverthebucketisrolledforwardtodumpthere-
turn-to-digelectriccircuitiscompletedandthesolenoid
onthebucketspoolisenergized.
Whentheloaderbucketcontrollever(3)ismoveddi-
agonallylefttothereturn-to-digposition(2)theelectro-
magnetwillholdthebucketspoolintherollbackpo-
sitionuntilthebucketisintheleveldiggingpositionat
whichtimetheindicatorontherodofthebucketlinkage
willpassinfrontofthesensorwhichde-energizesthe
electromagnetonthebucketspoolenablingthespool
toreturntotheneutralposition.
LEEN12T0585AA1
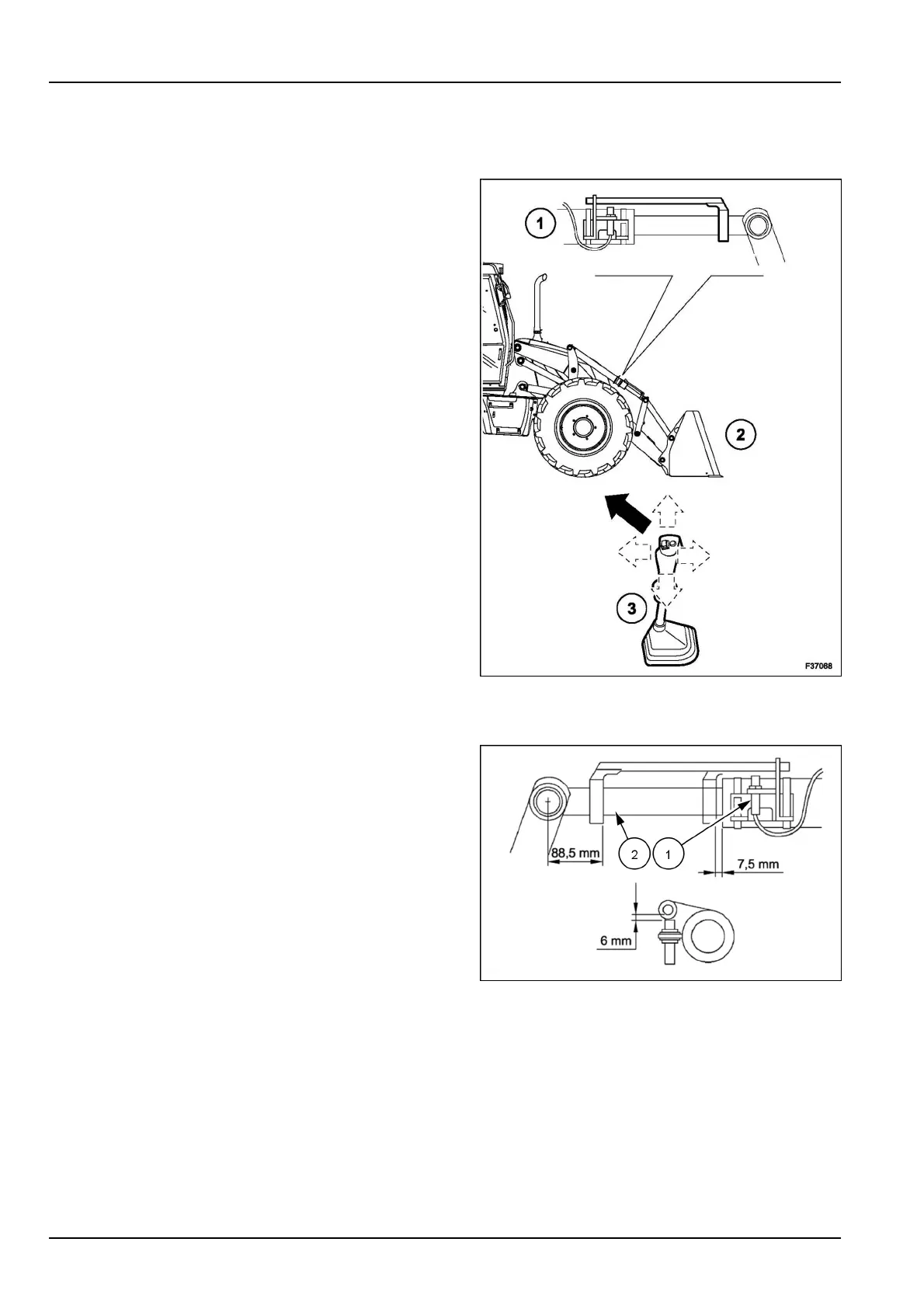
Return-to-digsensor-adjustment
1.Thereturn-to-digsystemconsistsofanelectromagnet
mountedontheloaderbucketcontrolvalvespool,a
sensor(1)mountedontopoftheloaderarmanda
pointerattachedtothetubeofthebucketself-levelling
linkage.
2.Placethebucketonthegroundinthepreferreddigging
position.
3.Checkthedimensionsof88.5mm(3.48in)and
7.5mm(0.29in)aremaintainedasshown.
4.Ensurethatthefaceofthesensor(1)is6mm(0.23in)
fromtherod(2).
LEEN12T0511AA2
NOTE:Asavisualaidfortheoperator,whileseatedinthecab,thepointermountedontheloaderarmcanbeseen
toalignwiththepointeronthereturn-to-diglinkage,whentheloaderarmsareloweredandthebucketisinthelevel
diggingposition.
7-138