Name Data type Property Description
TargetPoint2.
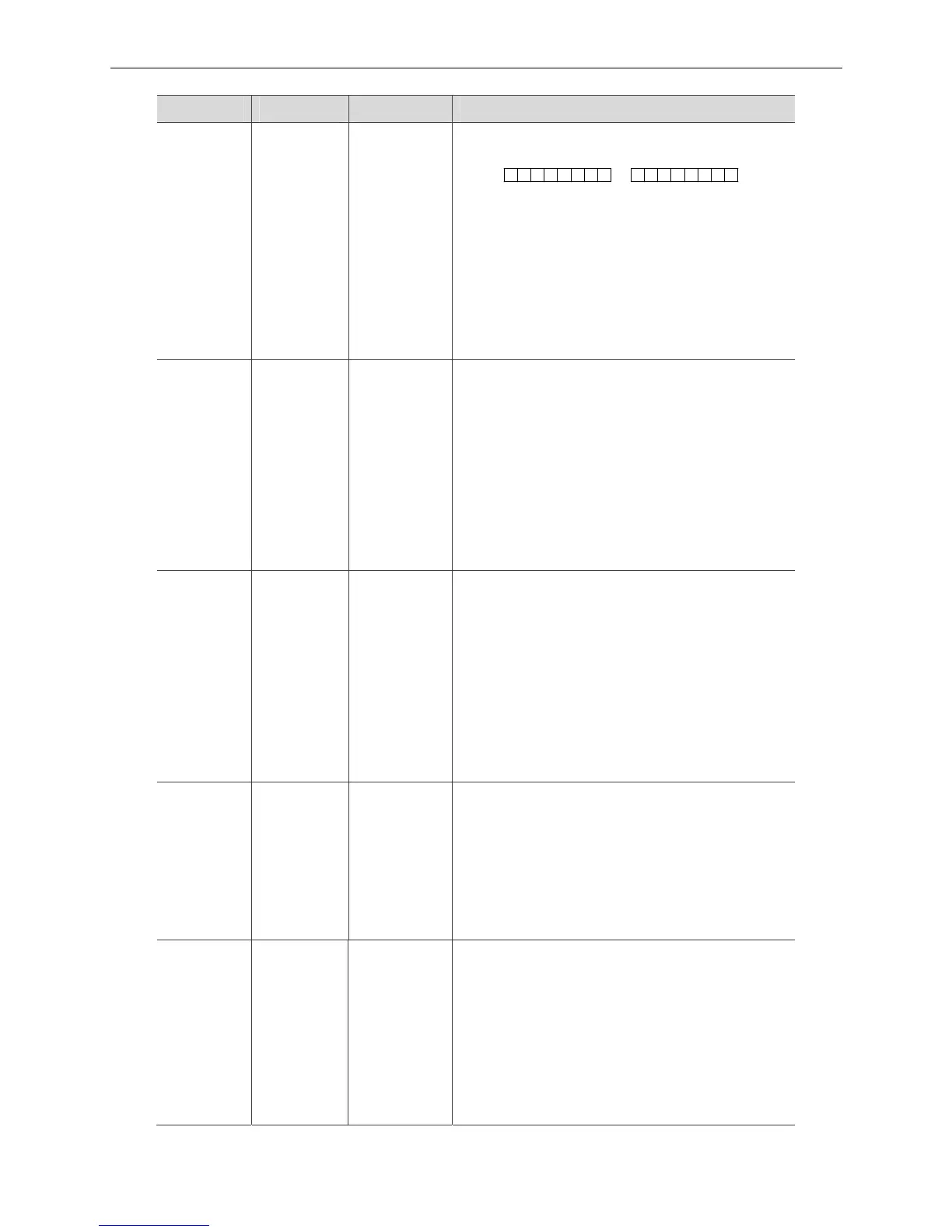
00000011 00001100
Node ID
16 Bits
M1 M2
123412
Assuming that M1 is the path of arc motion executed by
axis 1 and 2, and M2 is the parth executed by axis 3 and
4, then the parameter value should be 0x030C.
If M1 is the path of linear motion and M2 is the path of
arc motion executed by axis 3 and 4, the parameter
value will be 0x000C.
TargetPoint1 I32*
Array of pulse
for each axis
Array of the first target position; the array number should
equal to the axis number
If M1 is the path of linear motion, please input the end
point.
If M1 is the path of arc motion, please input the arc’s
circle center.
For other axes, please input the value which is identical
to the start position.
TargetPoint2 I32*
Array of pulse
for each axis
Array of the secondt target position; the array number
should equal to the axis number
If M2 is the path of linear motion, please input the end
point.
If M1 is the path of arc motion, please input the arc’s
circle center.
For other axes, please input the value which is identical
to the first target position.
Mode U16 Option
0: M1 and M2 are the paths of linear motion
1: M1 is the path of linear motion and M2 is the path of
arc motion
2: M1 is the path of arc motion and M2 is the path of
linear motion
3: M1 and M2 are the paths of arc motion
Parameter
I32
Value
Position error of the moving distance
Position error is defined as the shortest distance
between the actual motion path and target position.
When this value is set to 0, it means it will not
decelerate when passing the first target position and
machine will vibrate.
When this value is set too large, the system will