EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017
9-23
9
Name Data type Property Description
adjust the value to the valid range. Please refer to
_ECAT_Slave_CSP_Speed_Continue_Set_Combine
_ Ratio (section 9.19) for the description when the
ratio is set to 100.
ArcAngle1 F64 Angle (°)
If M1 is the path of linear motion, this value will be
ignored.
If M1 is the path of arc motion, this value is the arc
angle.
ArcAngle2 F64 Angle (°)
If M2 is the path of linear motion, this value will be
ignored.
If M2 is the path of arc motion, this value is the arc
angle.
SpeedRatio F64 Value
Speed ratio of M1 and M2, which is
.
Strvel I32 Pulse / second Parameter of the motion initial speed
ConstVel I32 Pulse / second Parameter of the motion constant speed
EndVel I32 Pulse / second Parameter of the motion end speed
TPhase1 F64 Time (second) Duration to change from initial speed to constant speed
TPhase2 F64 Time (second) Duration to change from constant speed to end speed
Scurve U16 Option
0: T-curve (Default)
2: S-curve
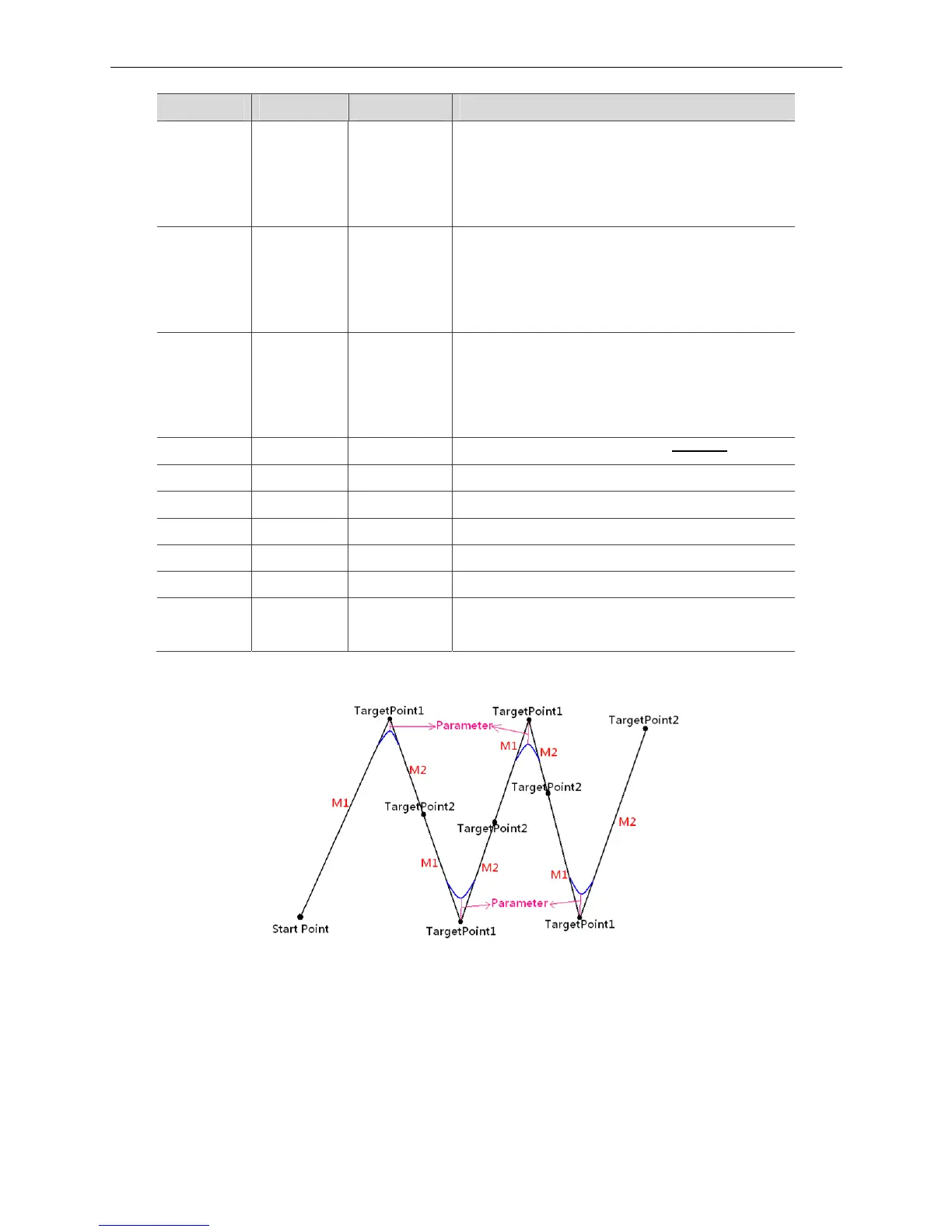
Description
Figure 9.11.1 In this figure, the path is consisted of four _ECAT_Slave_CSP_Start_Msbrline_Move
commands and Mode is set to 0