EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017 9-35
9
When Mode is set to 0:
If the moving distance and acceleration slope remain unchanged, users have to modify the
constant speed and acceleration/deceleration time.
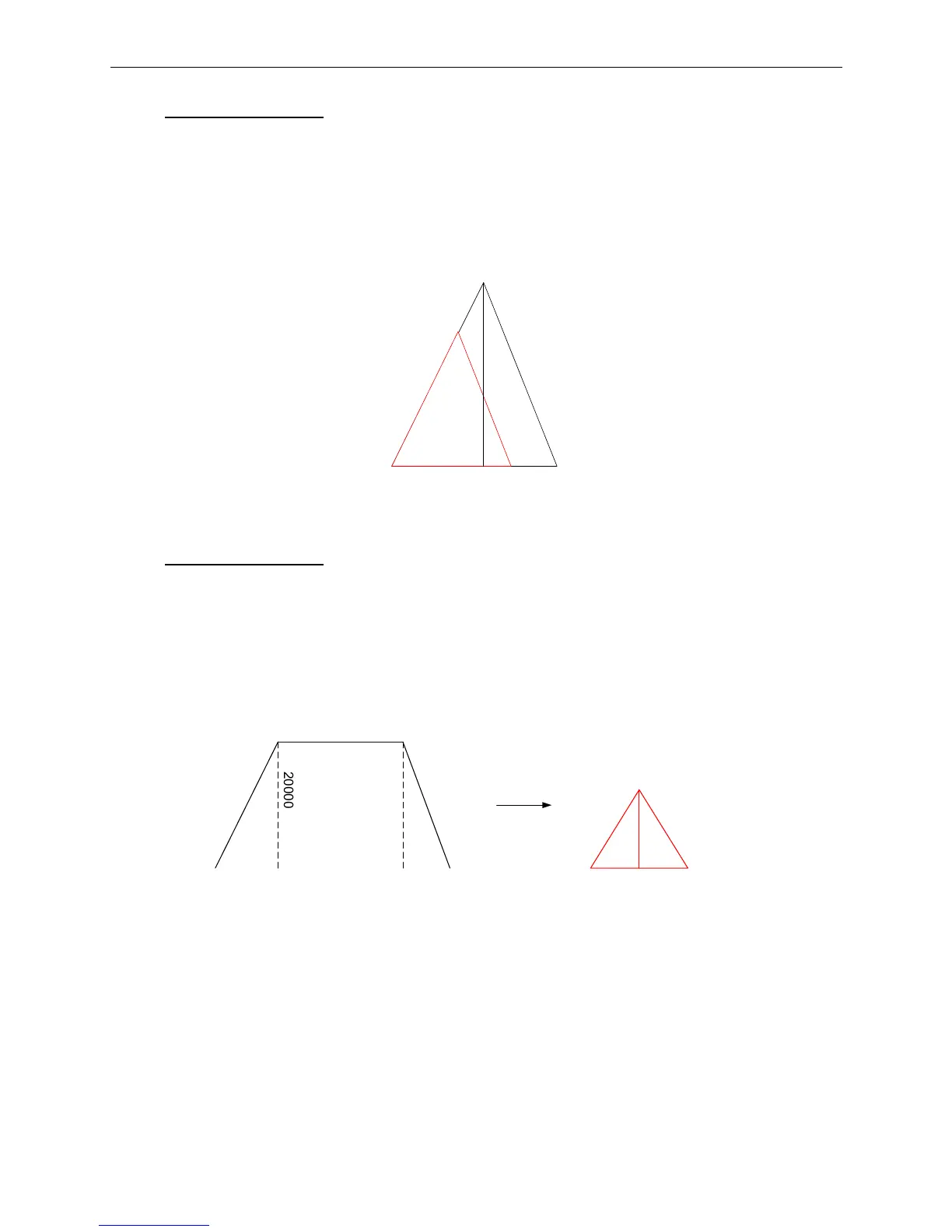
When Mode is set to 0, it will decrease the constant speed and acceleration /deceleration time in
accordance with the proportion. And the command can be completed with the set acceleration.
See figure 9.18.1. Black line shows the programmed path and the red line shows the actual path
(1000 mm).
20000
Tacc = 0.1 Tdec = 0.1
Figure 9.18.1
When Mode is set to 1:
If the moving distance and acceleration time remain unchanged, users have to modify the
constant speed and acceleration/deceleration slope. When Mode is set to 1, the acceleration and
deceleration time will remain 0.1 second, but the constant speed will be decreased. See figure
9.18.2. See figure 9.18.2. Black line shows the programmed path and the red line shows the
actual path (1000 mm).
Tdec = 0.1Tacc = 0.1
2
0
0
0
0
Tacc = 0.1 Tdec = 0.1
?
Figure 9.18.2