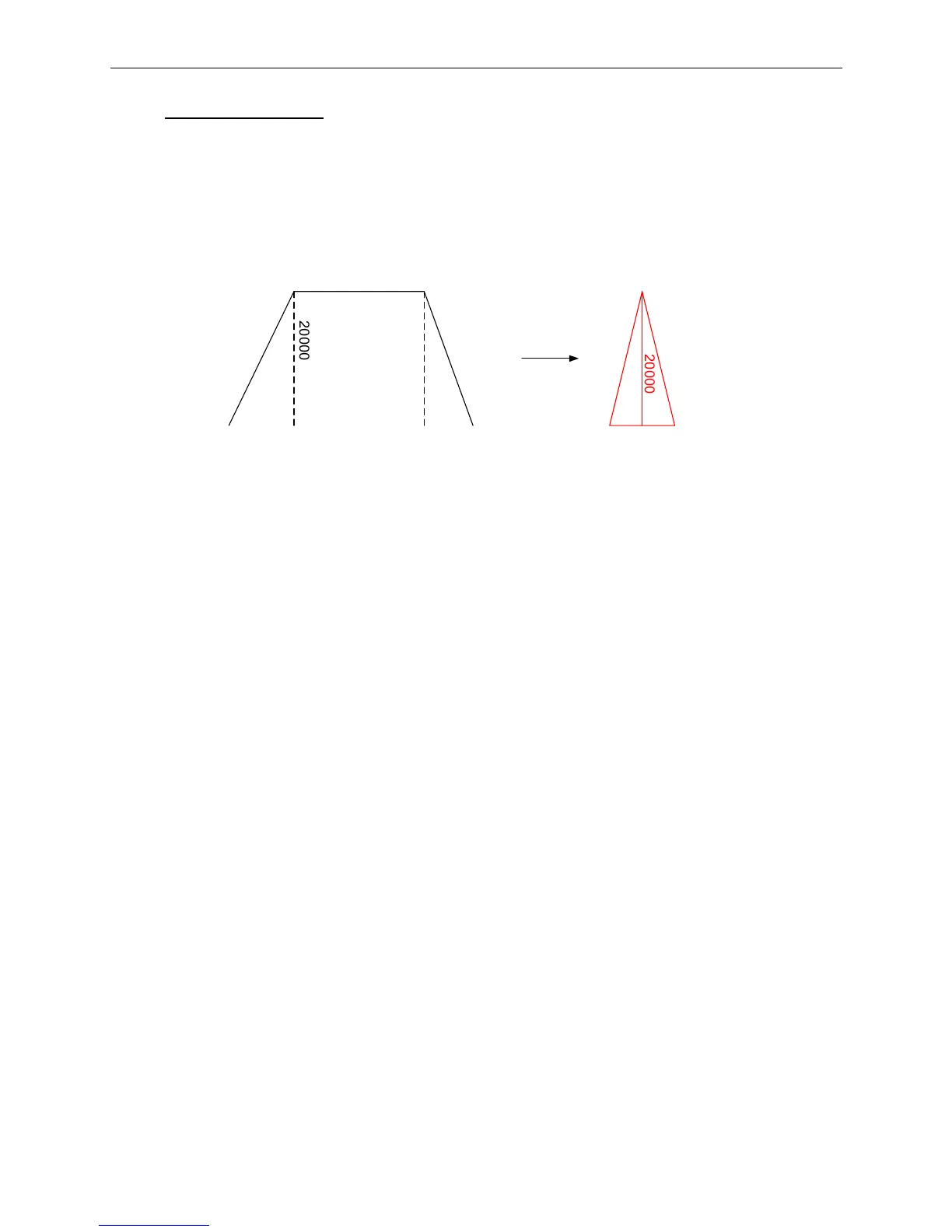
When Mode is set to 2:
If the moving distance and constant speed remain unchanged, users have to modify the
acceleration/deceleration time and slope. When Mode is set to 2, the constant speed will remain,
but the acceleration/deceleration time will be altered according to the actual application. See
figure 9.18.3. Black line shows the programmed path and the red line shows the actual path
(1000 mm).
Tdec = 0.1Tacc = 0.1
2
0
0
0
0
Tacc = ? Tdec = ?
2
0
0
0
0
Figure 9.18.3