EtherCAT Programming Guide Profile Position Mode (PP)
March, 2017 13-3
13
13.1 _ECAT_Slave_CST_Start_Move
Syntax
U16 PASCAL _ECAT_Slave_PP_Start_Move(U16 CardNo, U16 AxisNo, U16 SlotNo,
I32 TargetPos, U32 ConstVel, U32 Acceleration, U32 Deceleration, U16 Abs_Rel)
Purpose
This is for executing single-axis linear motion in PP mode.
Parameter
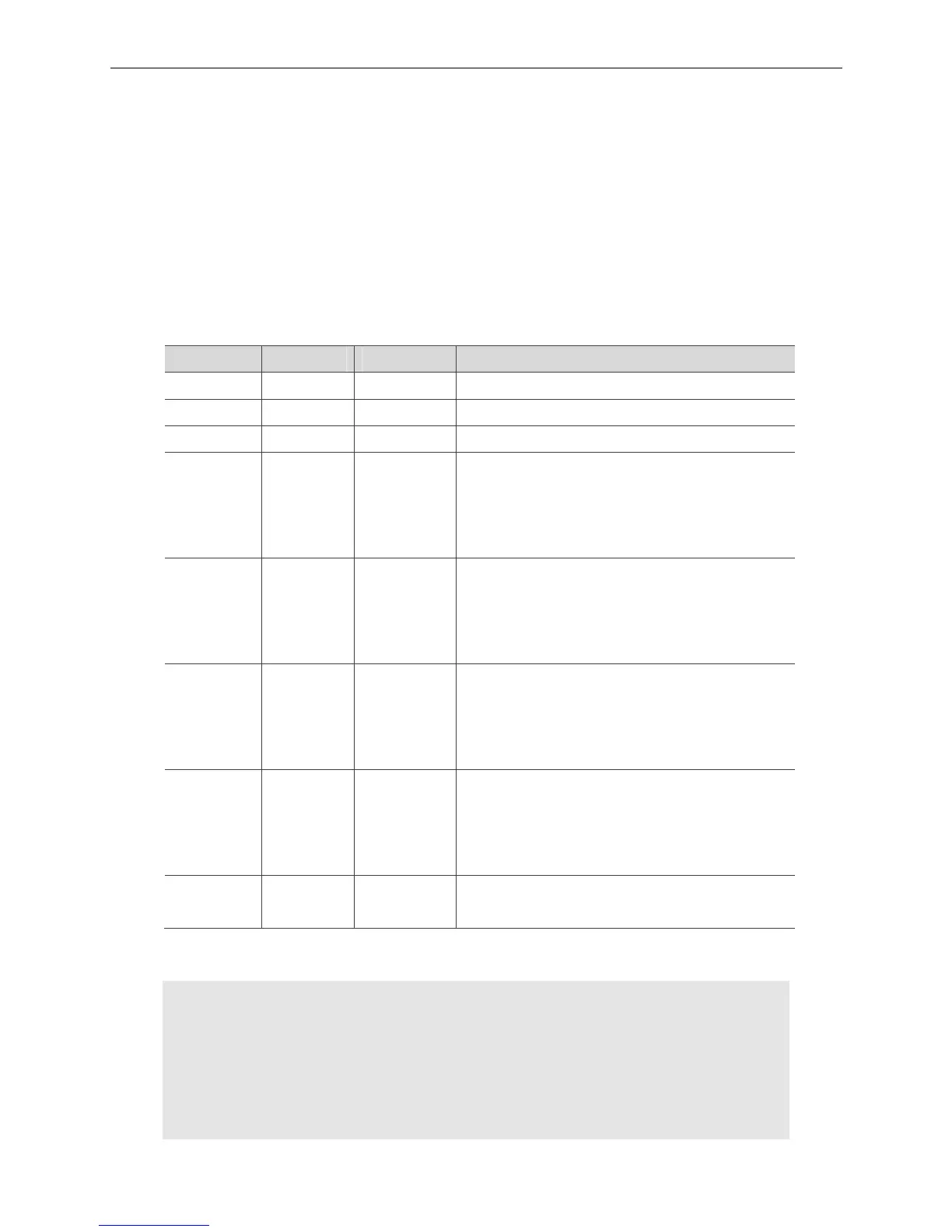
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
TargetPos I32 inc
The specified moving distance.
inc signifies the unit set in the slave device. Please refer
to the manual of the slave device for more details. (OD:
0x607A Sub 0)
ConstVel U32
Pulse per
second (pps)
Constant speed of the motion (inc/s)
inc signifies the unit set in the slave device. Please refer
to the manual of the slave device for more details. (OD:
0x6081 Sub 0)
Acceleration U32 Pulse / s^2
Acceleration (inc/s^2)
inc signifies the unit set in the slave device. Please refer
to the manual of the slave device for more details. (OD:
0x6083 Sub 0)
Deceleration U32 Pulse / s^2
Deceleration (inc/s^2)
inc signifies the unit set in the slave device. Please refer
to the manual of the slave device for more details. (OD:
0x6084 Sub 0)
Abs_Rel U16 Option
0: Relative movement (Default)
1: Absolute movement
Example
U16 Status;
U16 CardNo=16,AxisNo=1,SlotNo=0, Abs_Rel=1;
I32 Dist=5000000;
U32 MaxVel=2000000;
U32 TAcc = 100, Tdec = 100; // A2E: the time (ms) it takes to accelerate to 3000 rpm