DOBOT CR5 User Guide 5 Function Description of Software
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
50
When creating a Tool coordinate system, please make sure that the reference coordinate
system is the predefined Tool coordinate system.
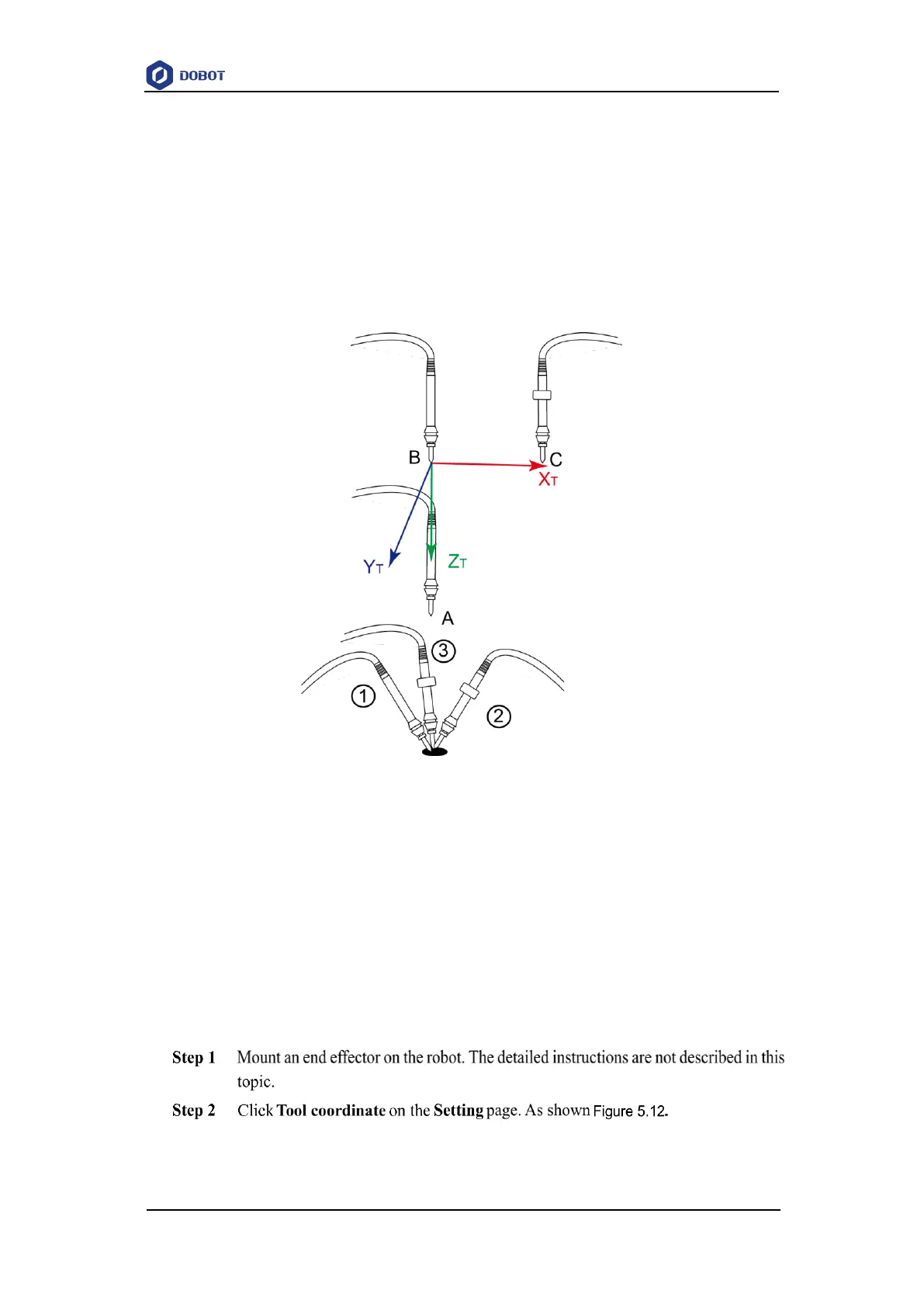
Tool coordinate system is created by three-point calibration method (TCP +ZX): After the end
effector is mounted, please adjust the direction of the end effector, to make TCP (Tool Center Point)
align with the same point (reference point) in three different directions, for obtaining the position
offset of the end effector, and then jog the robot to the other three points (A, B, C) for obtaining the
angle offset, as shown in Figure 5.11.
Figure 5.11 Three points calibration method (TCP+ZX)
Take the establishment of Tool 1 coordinate system as an example.
Prerequisites
The robot has been powered on.
The APP has been in the manual mode.
The robot is in the Cartesian coordinate system.
Procedure