11
ADVANCED USER GUIDE
Commander SX
IP66/Nema 4X variable speed drive
PARAMETER SETTING USING THE LCD KEYPAD
CONTROL TECHNIQUES
3854 en - 03.2008 / b
1.3.1 - Read mode
Read mode is used to display the status of the drive and its
main measurement points when stopped or during operation.
1.3.1.1 - List of displayed parameters
• Configuration of A1.A2:
• Configuration of A1.Pr and A2.Pr:
• Configuration of E.Pot:
• Configuration of Torq:
• Configuration of PID and PUMP:
• Configuration of PAD:
1.3.1.2 - Basic display
Name Address Unit
MOTOR SPEED 5.04 rpm
MOTOR FREQUENCY 5.01 Hz
TOTAL MOTOR CURRENT 4.01 A
ACTIVE CURRENT 4.02 A
OUTPUT VOLTAGE 5.02 V
DC BUS VOLTAGE 5.05 V
ANALOG INPUT 1 7.01 %
ANALOG INPUT 2 7.02 %
ANALOG/DIG./PTC INPUT 3 7.03 %
DIGITAL IN/OUT 1 to 4 STATE
+ SDI
8.01 to 8.07 -
RELAY + BRAKE OUTPUT 8.07 and 12.40 -
SELECTED REFERENCE 1.49 -
SELECTED PRESET REFERENCE 1.50 -
SPEED REFERENCE SELECTED 1.01 rpm
POST-RAMP REFERENCE 2.01 rpm
RUN COUNTER: YEARS/DAYS,
Hr/Min
6.22 and 6.23 -
ENERGY METER: MWh, KWh 6.24 and 6.25 -
TRIP -2 to
TRIP -10
10.21 to
10.29
-
Drive SOFTWARE VERSION 11.29 -
LCD KEYPAD VERSION - -
MAX DRIVE CURRENT RATING 11.32 -
LAST PRESET CONFIG. 11.48 -
Name Address Unit
ANALOG REFERENCE 2 1.37 rpm
ANALOG REFERENCE 1 1.36
rpm
Name Address Unit
ANALOG REFERENCE 1 1.36
rpm
Name Address Unit
MOTORISED POT. REFERENCE 9.03
%
Name Address Unit
ANALOG REFERENCE 1 1.36 rpm
TORQUE REFERENCE 4.08
%
Name Address Unit
PID REFERENCE 14.20 %
PID FEEDBACK 14.21 %
PID MAIN REFERENCE 14.19 %
PID ERROR 14.22 %
PID OUTPUT VALUE 14.01 %
Name Address Unit
REFERENCE VIA KEYPAD 1.17
rpm
0
+1500
mpr
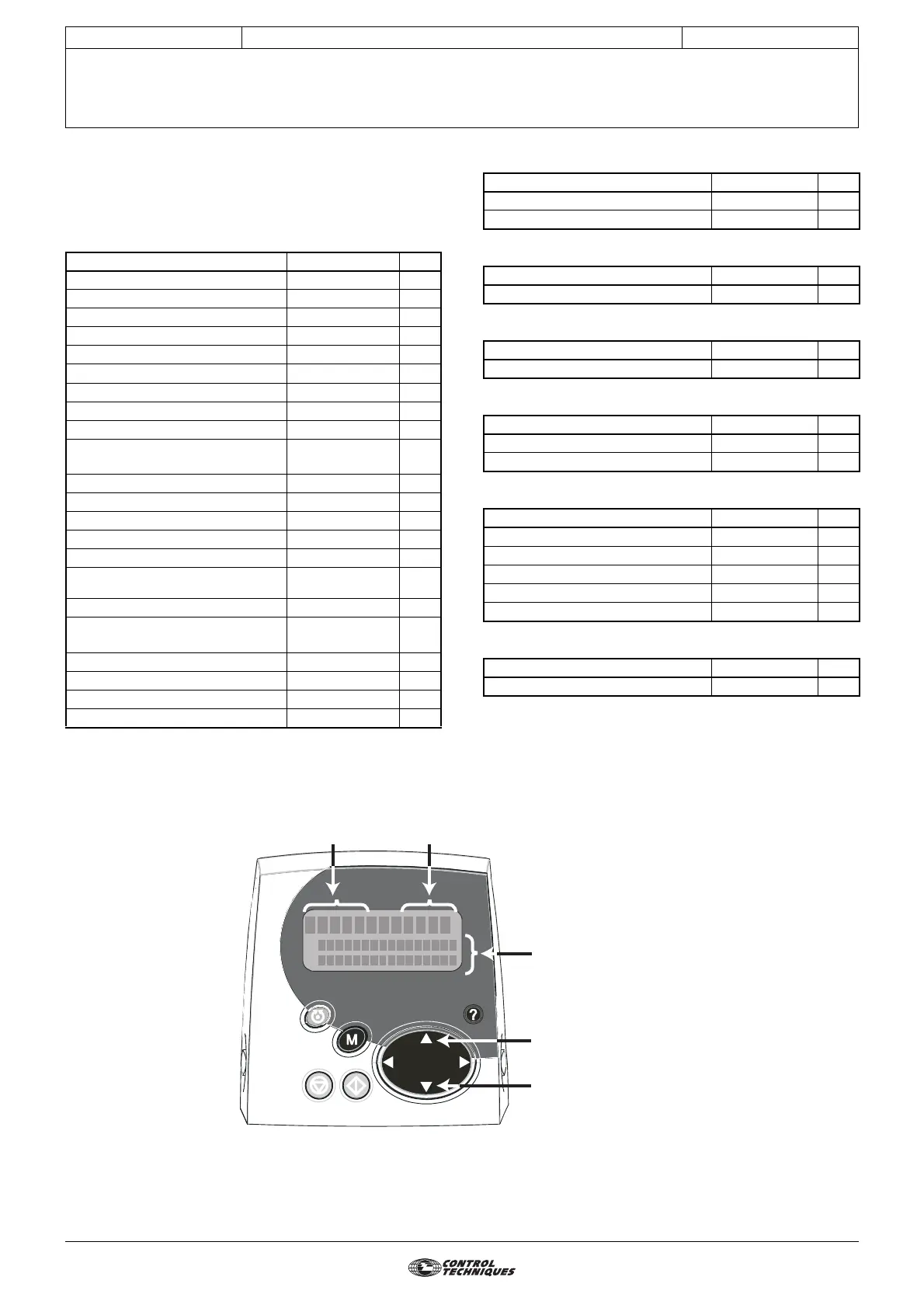
5.04:
SPEED
MO TOR
Display the next parameter
Display the previous paramete
Parameter address and name
Signed value Unit