87
ADVANCED USER GUIDE
Commander SX
IP66/Nema 4X variable speed drive
MENU 10: DRIVE STATES AND DIAGNOSTICS
CONTROL TECHNIQUES
3854 en - 03.2008 / b
12 - MENU 10: DRIVE STATES AND DIAGNOSTICS
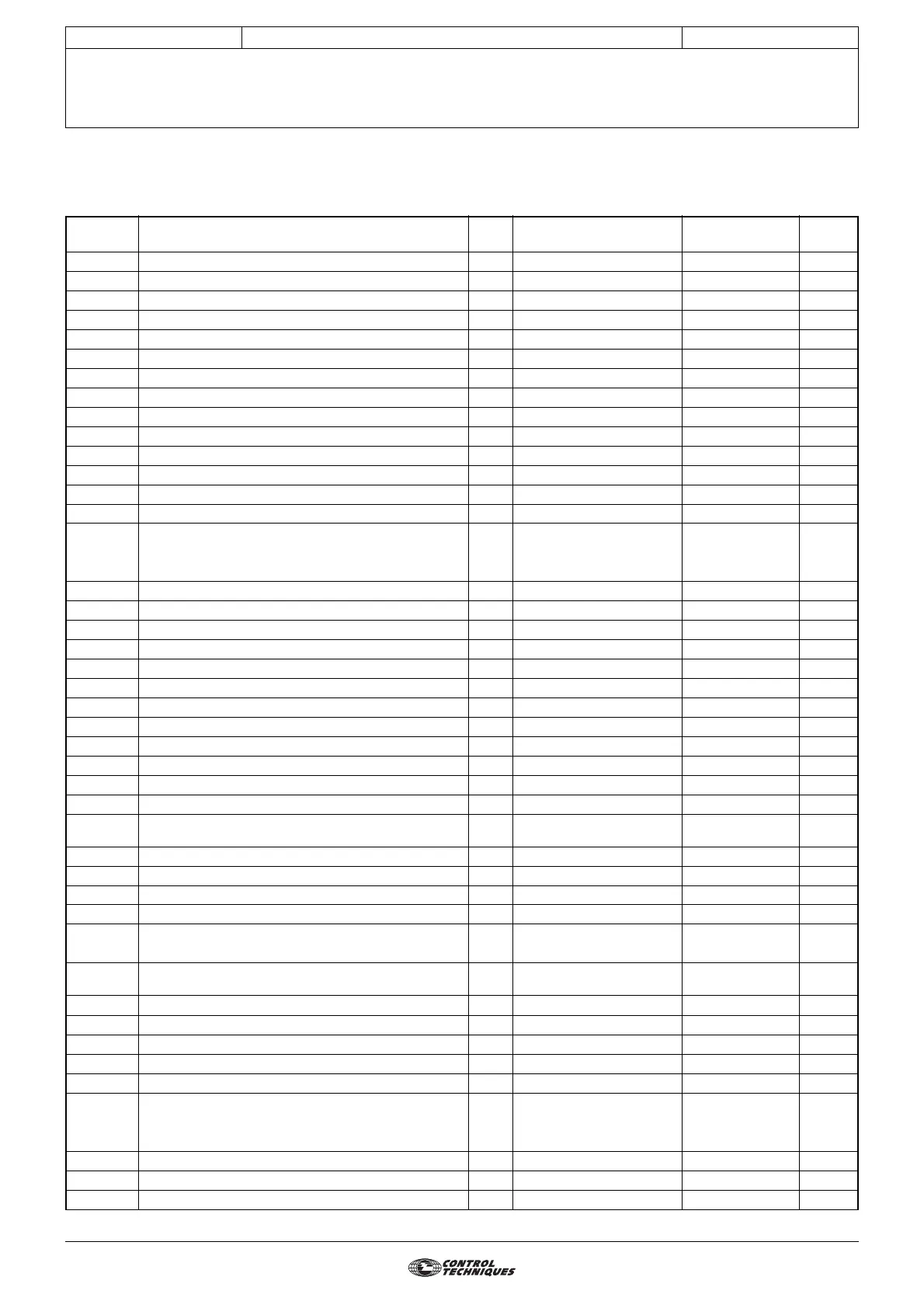
12.1 - List of parameters in Menu 10
Parameter Name Type Adjustment range Factory setting
User
setting
10.01 Drive healthy RO/P 0 or 1 - -
10.02 Drive active RO/P 0 or 1 - -
10.03 Zero speed RO/P 0 or 1 - -
10.04 Running at minimum speed RO/P 0 or 1 - -
10.05 Below set speed RO/P 0 or 1 - -
10.06 At speed RO/P 0 or 1 - -
10.07 Above set speed RO/P 0 or 1 - -
10.08 Load reached RO/P 0 or 1 - -
10.09 Drive output at current limit RO/P 0 or 1 - -
10.10 Drive regenerating RO/P 0 or 1 - -
10.11 Braking IGBT active RO/P 0 or 1 - -
10.12 Braking resistor alarm RO/P 0 or 1 - -
10.13 Direction commanded RO/P 0 or 1 - -
10.14 Direction running RO/P 0 or 1 - -
10.15
Not used
and
10.16
10.17 Overload alarm RO/P 0 or 1 - -
10.18 Drive over temperature alarm RO/P 0 or 1 - -
10.19 Drive general warning RO/P 0 or 1 - -
10.20 Trip 1 (most recent trip) RO/P 0 to 54 - -
10.21 Trip 2 RO/P 0 to 54 - -
10.22 Trip 3 RO/P 0 to 54 - -
10.23 Trip 4 RO/P 0 to 54 - -
10.24 Trip 5 RO/P 0 to 54 - -
10.25 Trip 6 RO/P 0 to 54 - -
10.26 Trip 7 RO/P 0 to 54 - -
10.27 Trip 8 RO/P 0 to 54 - -
10.28 Trip 9 RO/P 0 to 54 - -
10.29 Trip 10 (oldest trip) RO/P 0 to 54 - -
10.30 Full power braking time R-W 0 to 400.0 s 3.0 s (size 2: 4.0 s)
10.31 Full power braking period R-W 0 to 25.0 min 1.0 min
10.32 Not used
10.33 Drive reset R-W 0 or 1 0
10.34 No. of auto-reset attempts R-W
If 10.91=No (0): 0 to 5
0
If 10.91=Yes (1): 0 to 100
10.35 Auto-reset delay R-W 0 to 25.0 s 1.0 s
10.36 Hold drive healthy until last attempt R-W 0 or 1 0
10.37 Brak. IGBT/Stop on minor trip R-W 0 or 1 0
10.38 Serial link user trip R-W/P 0 to 100 0
10.39 Braking energy overload accumulator RO/P 0 to 100.0% - -
10.40 Decimal value of binary states 10.01 to 10.14 RO/P 0 to 16383 - -
10.41
Not used
to
10.50
10.51 V
min
alarm RO 0 or 1 - -
10.52 V
max
alarm RO 0 or 1 - -
10.53 Maximum speed RO 0 or 1 - -