115
ADVANCED USER GUIDE
Commander SX
IP66/Nema 4X variable speed drive
MENU 14: PID CONTROLLER
CONTROL TECHNIQUES
3854 en - 03.2008 / b
16 - MENU 14: PID CONTROLLER
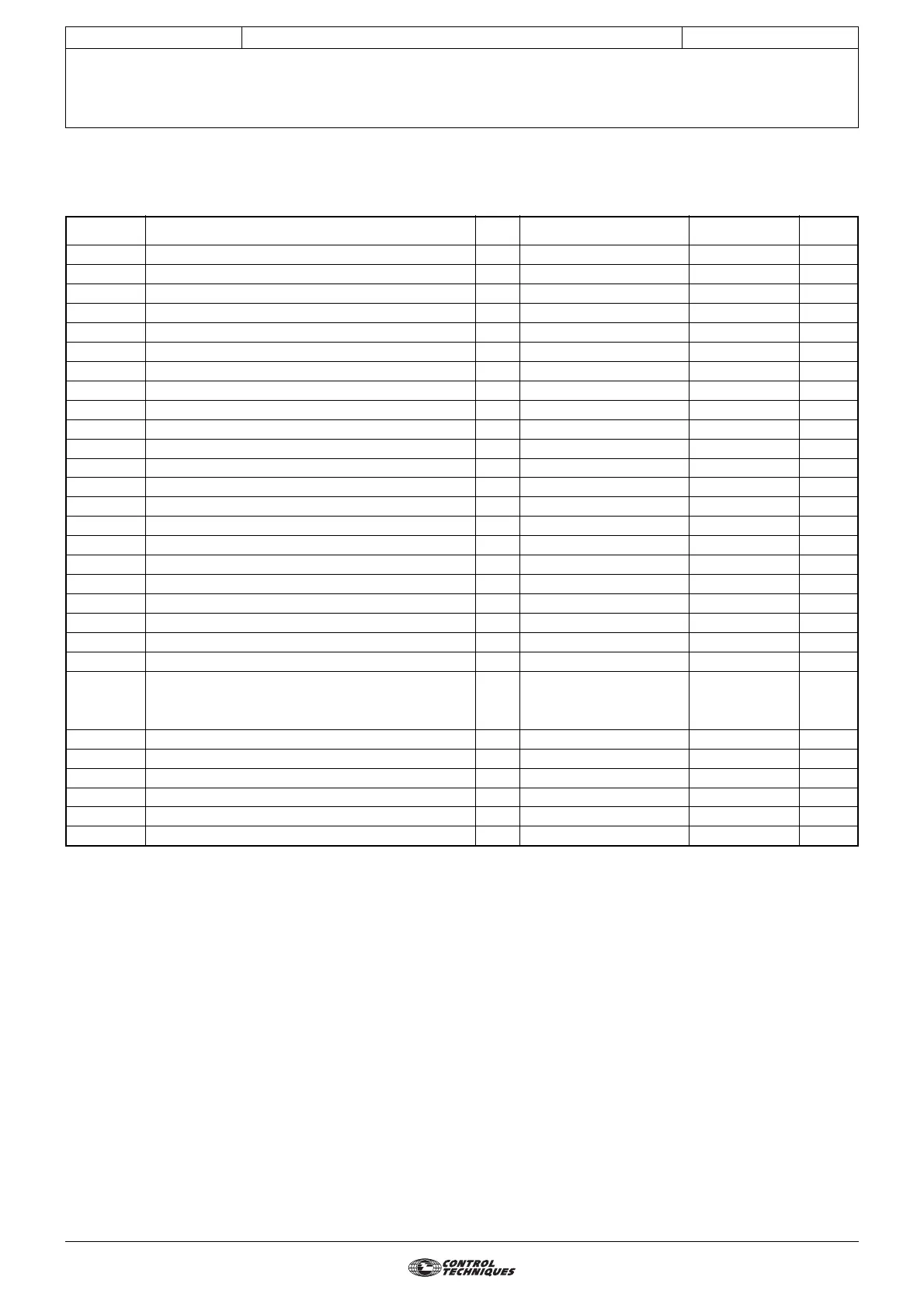
16.1 - List of parameters in Menu 14
Parameter Name Type Adjustment range Factory setting
User
setting
14.01 PID output RO/P ± 100.0% - -
14.02 PID main reference source R-W/P 0.00 to 21.51 0.00
14.03 PID reference source R-W/P 0.00 to 21.51 0.00
14.04 PID feedback source R-W/P 0.00 to 21.51 0.00
14.05 PID reference invert R-W 0 or 1 0
14.06 PID feedback invert R-W 0 or 1 0
14.07 PID reference slew rate limit R-W 0 to 600.0 s 0
14.08 PID enable R-W 0 or 1 0
14.09 PID option enable source R-W/P 0.00 to 21.51 10.01
14.10 PID proportional gain R-W 0 to 320.00 10,00
14.11 PID integral gain R-W 0 to 320.00 5,00
14.12 PID derivative gain R-W 0 to 2.50 0
14.13 PID upper limit R-W 0 to 100.0% 100.0%
14.14 PID lower limit R-W ± 100.0% -100.0%
14.15 PID output scaling R-W 0 to 2.50 1.00
14.16 PID output destination R-W/P 0.00 to 21.51 0.00
14.17 PID hold integrator R-W 0 or 1 0
14.18 PID symmetrical limit enable R-W 0 or 1 0
14.19 PID main reference RO/P ± 100.0% - -
14.20 PID reference RO/P ± 100.0% - -
14.21 PID feedback RO/P ± 100.0% - -
14.22 PID error RO/P ± 100.0% - -
14.23
Not used
to
14.50
14.51 Buffer no. 1 R-W ±100.0% 0
14.52 Buffer no. 2 R-W ±100.0% 0
14.53 Customer unit coefficient R-W 0 to 30 1
14.54 Customer reference value RO/P ±32000 - -
14.55 Customer feedback value RO/P ±32000 - -
14.56 Stop on Vmin enable R-W 0 or 1 0