37
ADVANCED USER GUIDE
Commander SX
IP66/Nema 4X variable speed drive
MENU 3: FREQUENCY THRESHOLDS - ENCODER OPTION
CONTROL TECHNIQUES
3854 en - 03.2008 / b
5 - MENU 3: FREQUENCY THRESHOLDS - ENCODER OPTION
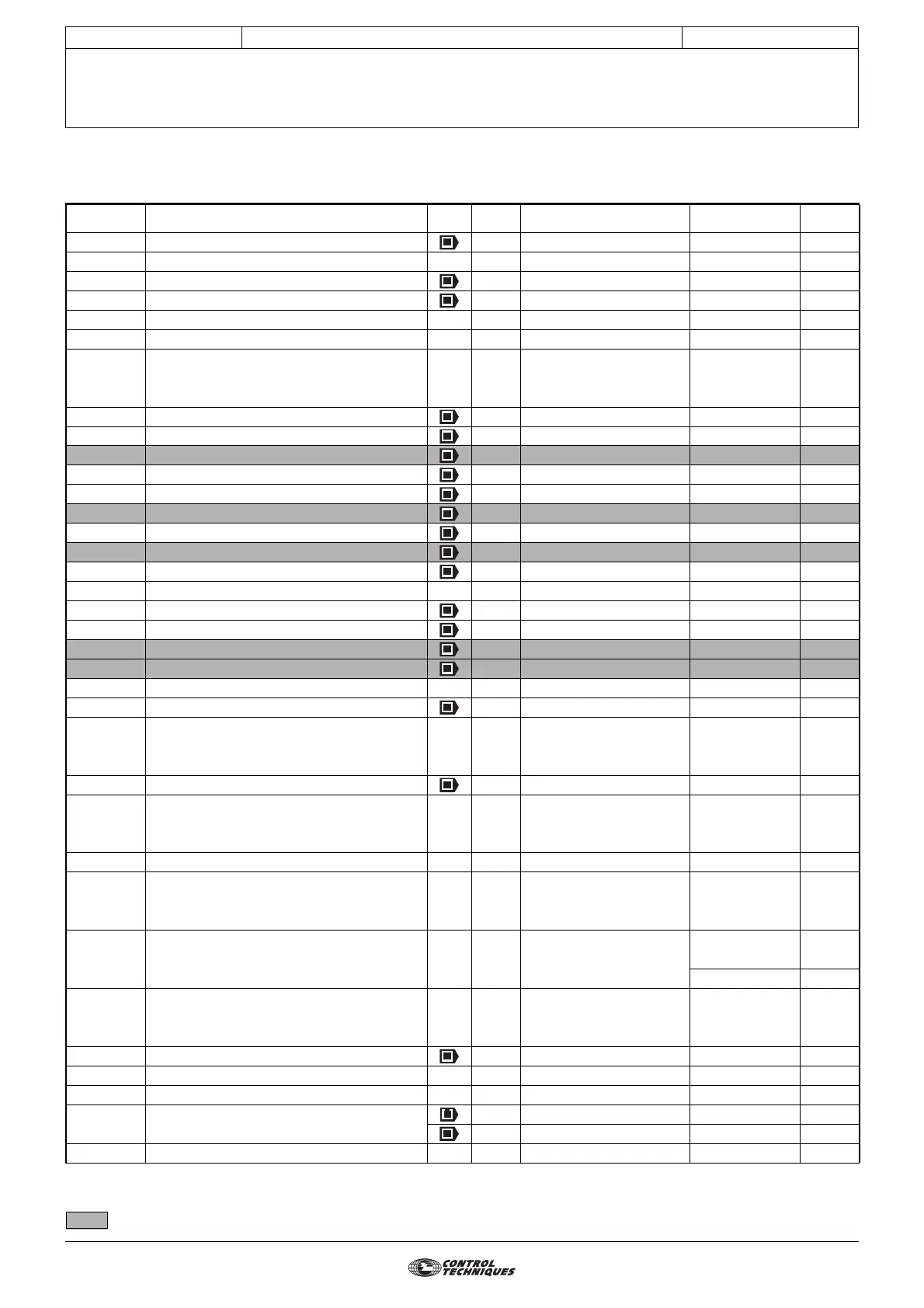
5.1 - List of parameters in Menu 3
Parameter Name Type Adjustment range Factory setting
User
setting
3.01 Final speed demand RO/P
± 2 x 1.06 rpm
-
3.02 Motor speed RO/P
± 2 x 1.06 rpm
-
3.03 Speed error RO/P
± 2 x 1.06 rpm
-
3.04 Speed control output RO/P ± 300.0% -
-
3.05 Zero speed threshold R-W
0 to 500 rpm 30 rpm
3.06 At speed lower limit R-W
0 to 500 rpm 30 rpm
3.07
Not used
to
3.09
3.10 Speed loop proportional gain (Kp1) R-W 0 to 32000 200
3.11 Speed loop integral gain (Ki1) R-W 0 to 32000 100
3.12 Speed loop differential gain (Kd1) R-W 0 to 32000 0
3.13 Speed loop proportional gain (Kp2) R-W 0 to 32000 200
3.14 Speed loop integral gain (Ki2) R-W 0 to 32000 100
3.15 Speed loop differential gain (Kd2) R-W 0 to 32000 0
3.16 Speed gain select R-W 0 or 1 0
3.17 Speed gain setup R-W 0 to 2 0
3.18 Total inertia R-W
0.001 to 32.000 Kkgm
2
0.001 Kkgm
2
3.19 Not used
3.20 Bandwidth R-W 0.1 to 255.0 Hz 10.0 Hz
3.21 Damping factor R-W 0 to 10.0 1.0
3.22 Hard speed reference R-W
0 to 2 x 1.06 rpm
0
3.23 Hard speed reference selector R-W 0 or 1 0
3.24 Not used
3.25 Encoder phase angle R-W 0 to 359.9° 0
3.26
Not used
to
3.28
3.29 Drive encoder position RO/P -32768 to +32767 -
-
3.30
Not used
to
3.33
3.34 Encoder lines per revolution R-W 0 to 32000 lpr 1024 lpr
3.35
Not used
to
3.37
3.38 Encoder type R-W 0 to 8
If 11.31 = 0 to 2:
0
If 11.31 = 3: 3
3.39
Not used
to
3.41
3.42 Drive encoder filter R-W 0 to 10 3.0
3.43 Maximum frequency input encoder reference R-W 0 to 32000 5000
3.44 Frequency input reference scale R-W 0 to 2.0000 1.0000
3.45 Frequency input reference
RO/P 0 to 100% -
-
RO/P ± 100% -
-
3.46 Frequency input reference destination R-W/P 0.00 to 21.51 0.00
: Function not available