47
ADVANCED USER GUIDE
Commander SX
IP66/Nema 4X variable speed drive
MENU 4: CURRENT AND TORQUE CONTROL
CONTROL TECHNIQUES
3854 en - 03.2008 / b
6 - MENU 4: CURRENT AND TORQUE CONTROL
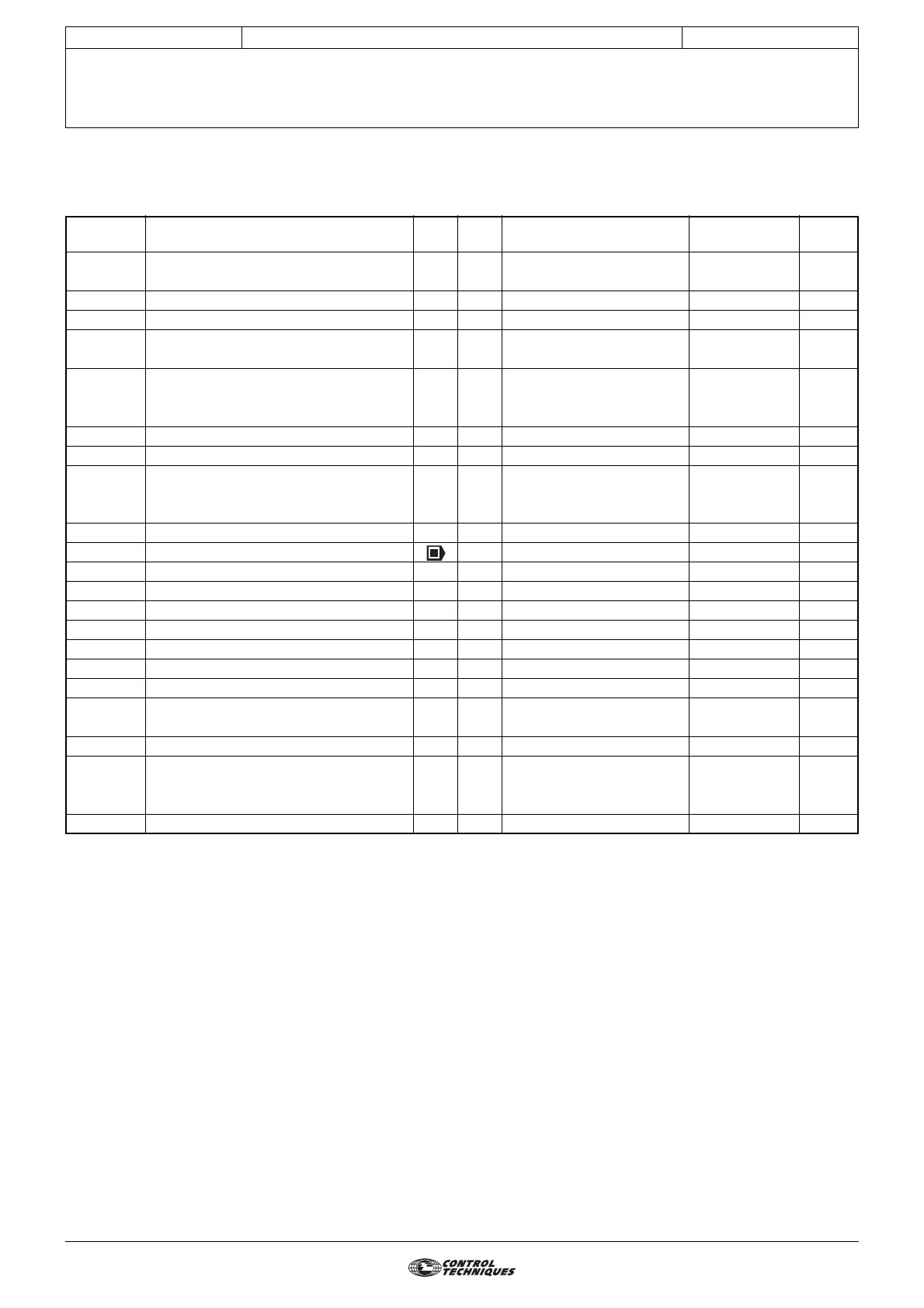
6.1 - List of parameters in Menu 4
Parameter Name Type Adjustment range Factory setting
User
setting
4.01 Current magnitude RO/P
0 to max. current
--
drive (A)
4.02 Active current RO/P ± max. drive current - -
4.03 Not used
4.04 Current demand RO/P
± active current limit
--
(% active In)
4.05
Not used
and
4.06
4.07 Symmetrical current limit R-W 0 to + 300.0% (% active In) 165.0%
4.08 Torque reference R-W ± 300.0% (% active In) 0
4.09
Not used
and
4.10
4.11 Torque mode selector R-W 0 or 1 0
4.12 Current demand filter R-W 0 to 10 ms 0
4.13 Current loop proportional gain R-W 0 to 999 20
4.14 Current loop integral gain R-W 0 to 250 40
4.15 Thermal time constant R-W 0 to 250 s 89 s
4.16 Thermal protection mode R-W 0 or 1 0
4.17 Reactive current RO/P ± 9999 - -
4.18 Overriding current limit RO/P 0 to + 300% (% active In) - -
4.19 Overload accumulator RO/P 0 to 100.0% - -
4.20 Percentage load RO/P
± active current limit
--
(% active In)
4.21 Selection of load display R-W 0 or 1 0
4.22
Not used
to
4.51
4.52 Max. speed in torque control mode R-W
0 to 32000 rpm 1500 rpm