Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
14 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 10
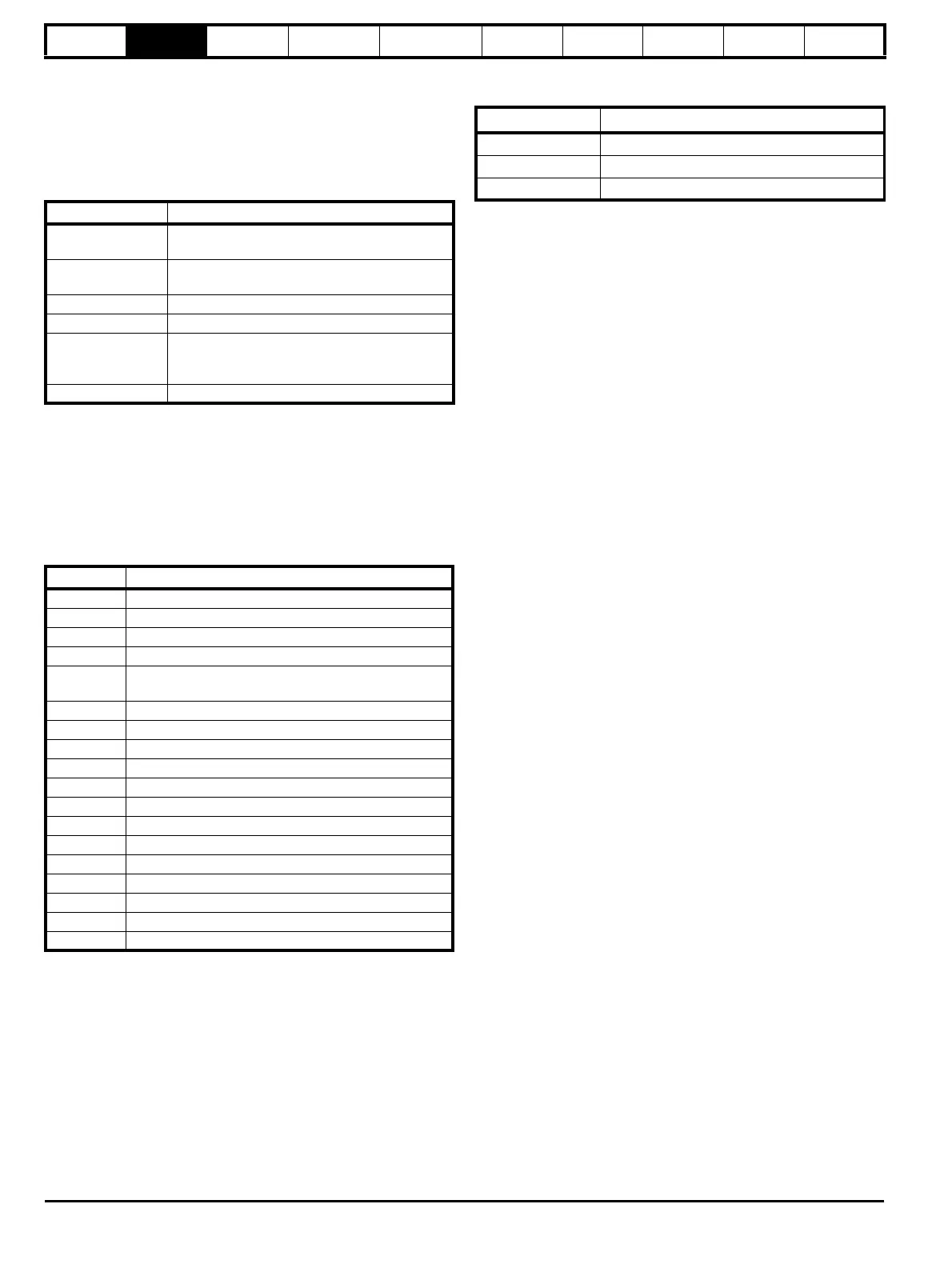
2.8 Alarm and trip display
An alarm can flash alternately with the data displayed on the 2nd row
when one of the following conditions occur. If action is not taken to
eliminate the alarm, except "Auto tune", "Lt" and "PLC", the drive may
eventually trip. Alarms flash once every 640ms except "PLC" which
flashes once every 10s. Alarms are not displayed when a parameter is
being edited.
When a trip occurs the drive switches to status mode and "trip" is shown
on the 1st row and the trip string flashes on the 2nd row. If the trip is a
power module trip and the drive is a multi-module drive, the number of
the power module that initiated the trip flashes alternately with the trip
string. The read only parameters listed below are frozen with any trip
except UV trip until the trip is cleared. For a list of the possible trip strings
see Pr 10.20. Pressing any of the parameter keys changes the mode to
the parameter view mode. If the trip is HF01 to HF16 then no key action
is recognized.
2.9 Keypad control mode
The drive can be controlled from the keypad if Pr 1.14 is set to 4. The
Stop and Run keys automatically become active (the Reverse key may
be optionally enabled with Pr 6.13). The frequency/speed reference is
defined by Pr 1.17. This is a read only parameter that can only be
adjusted in status mode by pressing the Up or Down keys. If keypad
control mode is selected, then pressing the Up or Down keys in status
mode will cause the drive to automatically display the keypad reference
and adjust it in the relevant direction. This can be done whether the drive
is disabled or running. If the Up or Down keys are held the rate of
change of keypad reference increases with time.
The units used for to display the keypad reference for different modes
are given below.
2.10 Drive reset
A drive reset is required to: reset the drive from a trip (except some
“HFxx” trips which cannot be reset); and other functions as defined in
section 3 Parameter x.00 on page 16. A reset can be performed in four
ways:
1. Stop key: If the drive has been set up such that the stop key is not
operative then the key has a drive reset function only. When the stop
function of the stop key is enabled, a reset is initiated while the drive
is running by holding the Run key and then pressing the Stop key.
When the drive is not running the Stop key will always reset the
drive.
2. The drive resets after a 0 to 1 transition of the Drive Reset parameter
(Pr 10.33). A digital input can be programmed to change this
parameter.
3. Serial comms, fieldbus or applications Solutions Module: Drive reset
is triggered by a value of 100 being written to the User trip parameter
(Pr 10.38).
4. Auto reset: Pr 10.34 can be used to provide an auto-reset function.
If the drive trips EEF (internal EEPROM error) then it is not possible to
reset the drive using the normal reset methods described above. 1233 or
1244 must be entered into Pr x.00 before the drive can be reset. Default
parameters are loaded after an EEF trip, and so the parameters should
be reprogrammed as required and saved in EEPROM.
If the drive is reset after a trip from any source other than the Stop key,
the drive restarts immediately, if:
1. A non-latching sequencer is used with the enable active and one of
run forward, run reverse or run active
2. A latching sequencer is used if the enable and not stop are active
and one of run forward, run reverse or run is active.
If the drive is reset with the Stop key the drive does not restart until a not
active to active edge occurs on run forward, run reverse or run.
2.11 Second motor parameters
An alternative set of motor parameters are held in menu 21 which can be
selected by Pr 11.45. When the alternative parameter set is being used
by the drive the decimal point after the right hand digit in the 1st row is
on.
Alarm string Alarm condition
br.rS
Braking resistor (Pr 10.39 > 75.0% and the
braking IGBT is active)
OVLd
Motor overload (Pr 4.20 > 75% and the drive
output current > Pr 5.07)
hot Heatsink or control board alarms are active
Auto tunE Auto tune in progress
Lt
Indicates that a limit switch is active and that it is
causing the motor to be stopped (i.e. forward
limit switch with forward reference etc).
PLC On-board PLC program is running
Parameter Description
1.01 Frequency reference/Speed reference
1.02 Frequency reference/Speed reference
1.03 Pre-ramp reference
2.01 Post-ramp reference
3.01
Frequency slaving demand/ Final speed reference/
Reactive power
3.02 Speed feedback
3.03 Speed error
3.04 Speed controller output
4.01 Current magnitude
4.02 Active current
4.17 Magnetising current
5.01 Output frequency
5.02 Output voltage
5.03 Power
5.05 DC bus voltage
7.01 Analog input 1
7.02 Analog input 2
7.03 Analog input 3
Mode Unit
Open loop Hz
Closed loop rpm
Servo rpm

 Loading...
Loading...








