Menus 15 to 17
SM-Encoder Pl
Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
286 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 10
A sliding window filter may be applied to the feedback. This is particularly useful in applications where the feedback is used to give speed feedback
for the speed controller and where the load includes a high inertia, and so the speed controller gains are very high. Under these conditions, without a
filter on the feedback, it is possible for the speed loop output to change constantly from one current limit to the other and lock the integral term of the
speed controller. The filter is not active if the parameter value is 0 or 1ms, but operates over the defined window for parameter values of 2, 4, 8 and
16ms.
The encoder simulation system provides an encoder output with minimal delay from either the drive encoder (Pr x.24 = 3.29) or the encoder
connected to this option module (Pr x.24 equal to any other value). The drive encoder can be an incremental encoder (Ab, Fd, Fr, Ab.Servo,
Fd.Servo, Fr.Servo) or it can be a SINCOS encoder (SC, SC.Hiper, SC.EnDat or SC.SSI). If any other encoder types are selected the output is
undefined. If a SINCOS encoder is being used the encoder simulation is derived from the sine waves and does not include interpolation information.
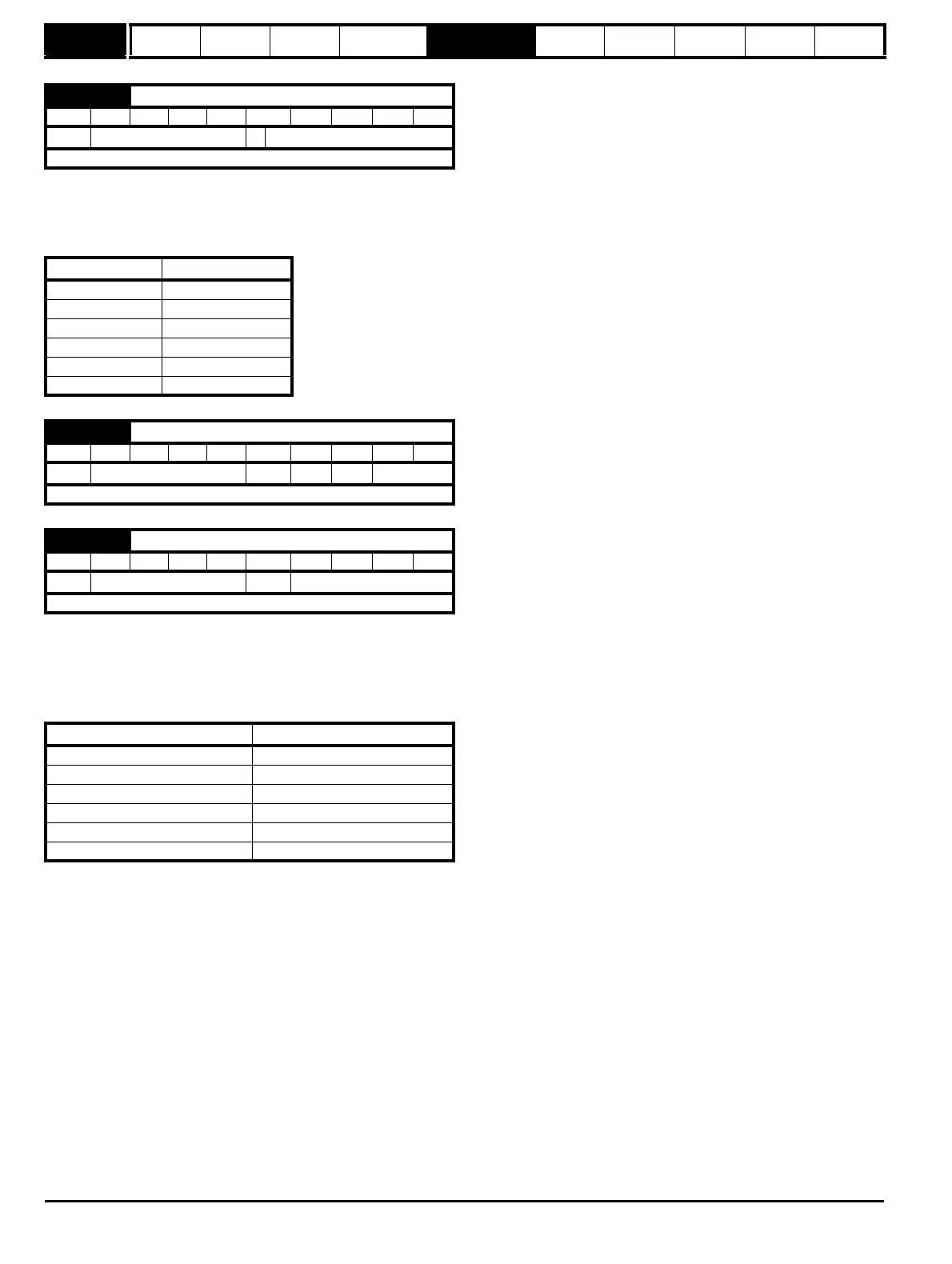
The ratio between the change of encoder position and the change of encoder simulation output position is defined by Pr x.25. The table below shows
the possible ratios.
x.19 Feedback filter
RW Uni US
Ú
0 to 5 (0 to 16 ms)
Ö
0
Update rate: Background read
Value in Pr x.19 Filter window
0 Not active
1 Not active
22ms
44ms
88ms
16 16ms
x.24 Encoder simulation source
RW Uni PT US
Ú
0.00 to 21.51
0.00
Update rate: Background read
x.25 Encoder simulation ratio numerator
RW Uni US
Ú
0.00 to 3.00
0.25
Update rate: Background read
Pr x.25 Ratio
0.0000 to 0.0312 1/32
0.0313 to 0.0625 1/16
0.0626 to 0.1250 1/8
0.1251 to 0.2500 1/4
0.2501 to 0.5000 1/2
0.5001 to 3.0000 1

 Loading...
Loading...








