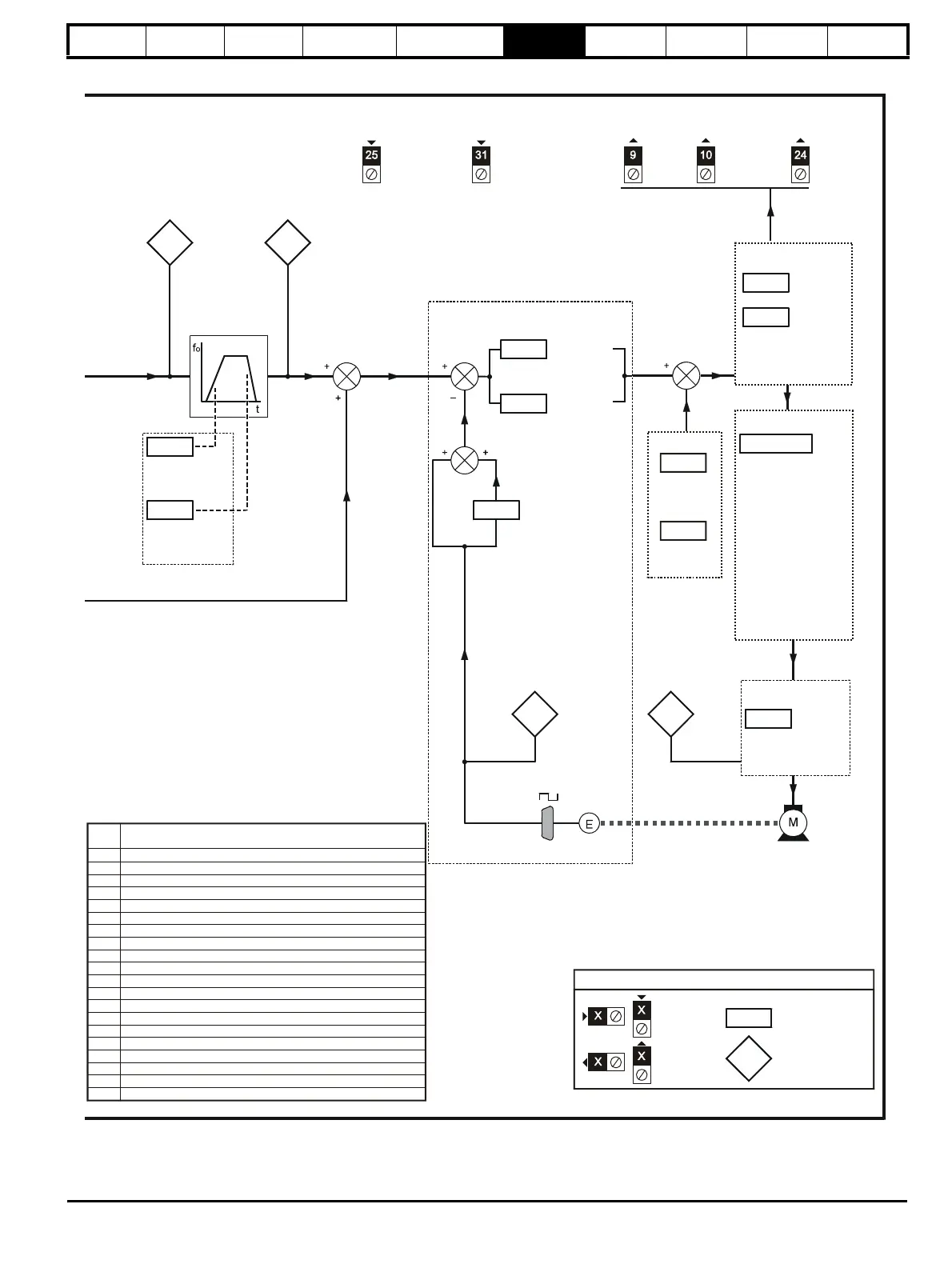
Pr Function
0.11 Pre-ramp reference
0.12 Post-ramp reference
0.13 Motor active-current
0 14 Relative jog reference
0.15 Position loop mode
0.16 Feedback encoder no. of lines per revolution (drive)
0.17
0.18 Feedback-encoder/Reference-resolver speed (drive)
0.19
0.20 Position error
0.21
0.22
0.23 Reference
0.24 Position-loop gain
0.25 Positioning speed limit
0.26 Orientation reference
0.27 Orientation acceptance window
0.28 Stop mode
0.29
0.30
selector
selector
Reference encoder/resolver ratio
Feedback-encoder/Reference-resolver position (drive)
Reference-encoder/Feedback-resolver position (option)
Reference-encoder/Feedback-resolver speed (option)
encoder no. of lines/pulses per revolution (option)
Reference encoder/resolver revolution counter
Feedback encoder/resolver revolution counter

 Loading...
Loading...








