B RS232 serial interface
Festo – GDCP-CMMS/D-FW-EN – 1404NH – Engli sh 237
B.2 Commands/syntax of the RS232 interface
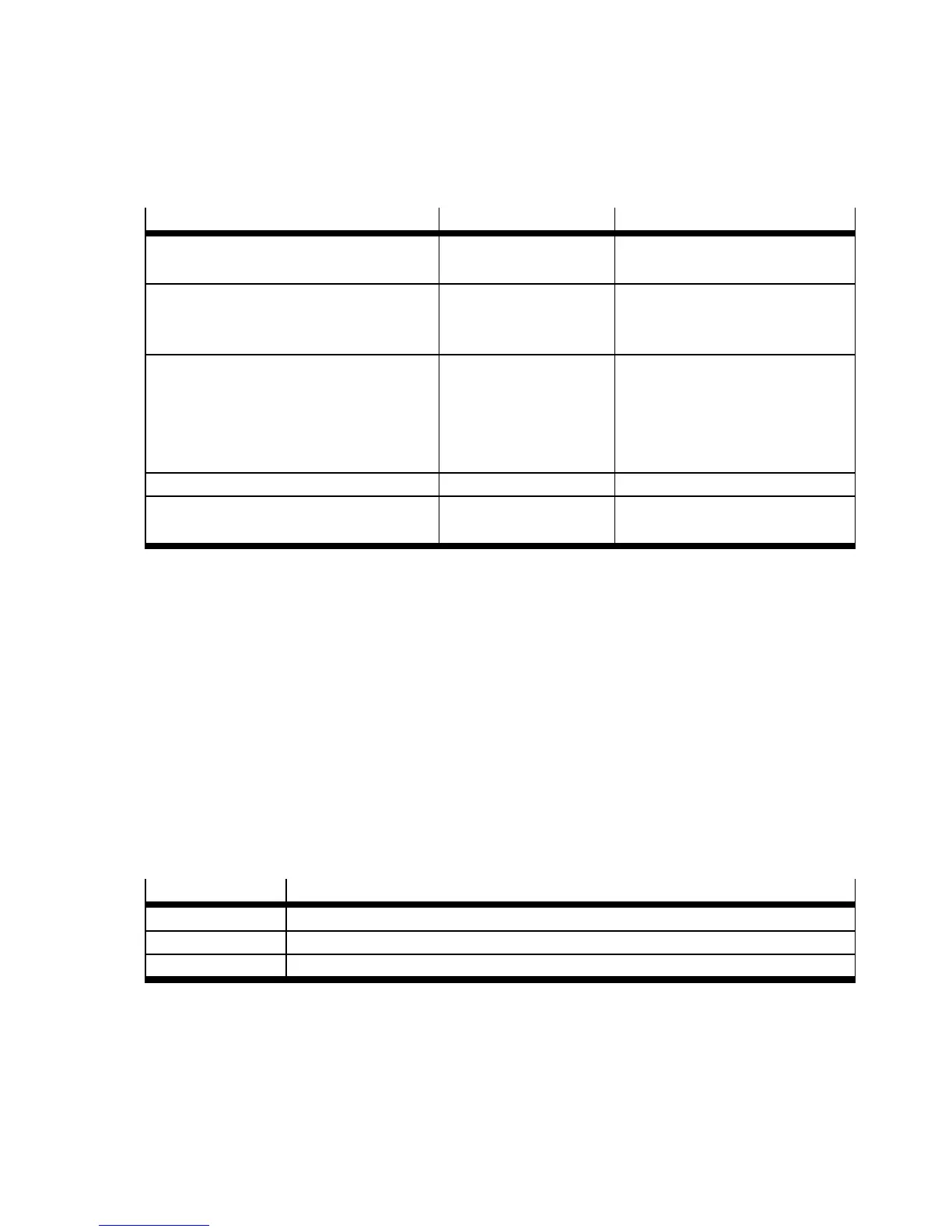
B.2.1 General commands
Command
Syntax Answer
New initialisation of the positioning
controller
RESET! None ( switch-on message)
Save the curre nt parameter re cord and
all position records in the non-volatile
flash memory
SAVE! DONE
Setting the transmission rate for serial
communication
BAU D9600
BAU D19200
BAU D38400
BAU D57600
BAU D115200
Unknown command Any ERRO R!
Reading the version number of the
firmware.
VERSION? 2300:VERSION:MMMM.SSSS
MMMM: Main version: 16 Bit (hexadecimal format)
SSSS: Subversion: 16 Bit (hexadecimal format)
Tab. B.3 G eneral commands
B.2.2 Control motor controller via CAN-Interpreter (CI)
Communication of the CAN-Inte r preter (CI) is based on the service data objects (SDO) of the CANope n
device profile CiA 402. Through the RS232 interface, the motor controller can be parameterised and
controlled.
Command syntax
Read: ?XXXXYY
8 bit write: =XXXXYY:WW
16 bit write: =XXXXYY:WWWW
32 bit write: =XXXXYY:WWWWWWWW
Brief description
Significance
XXXX Command index
YY Command sub-index
WWWW Data
Tab. B.4 Command syntax RS232
For additional information on CAN objects description “device profile CiA 402, simulation of SDO
access”, GDCP-CMMS/D-C-CO-…

 Loading...
Loading...






