4 Dimension reference system
76 Festo – GDCP-CMMS/D-FW-EN – 1404NH – English
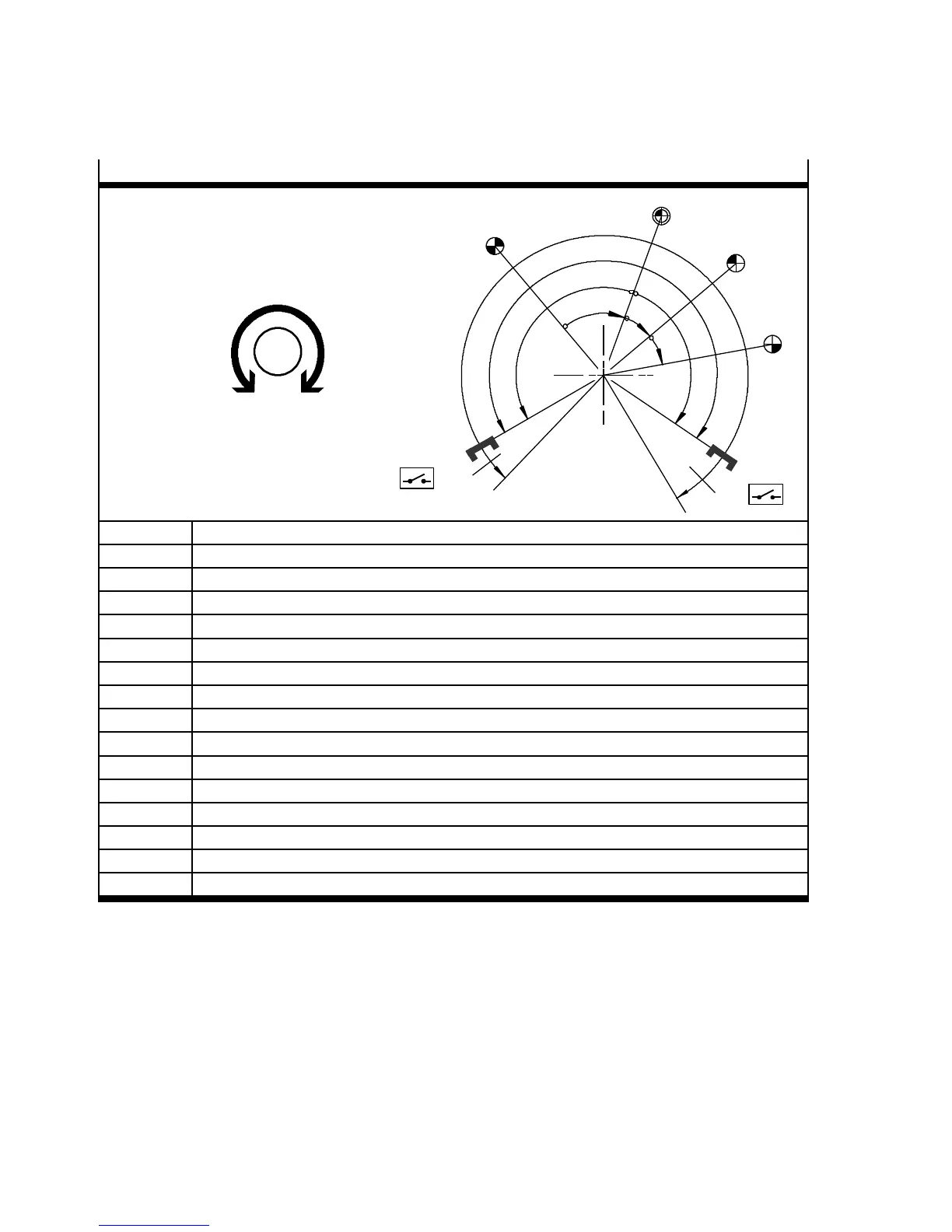
4.1.2 Measuring system for rotative drives
Example: Homing method “current position”
REF
AZ
a
b
e
PZ
d
1
2
M
Turn positive (+)
Turn nega tive (–)
c
TP/AP
SLP
SLN
LSN
LSP
REF Homing point (reference point)
1)
AZ Axis zero point
1)
PZ Projec t zero point
SLN Negative software end position (SW limit negative)
SLP Positive software end position (SW limit positive)
LSN Limit switch (hardware) negative ( Limit switch negative)
1)
LSP Limit switch (hardware) positive (Limit switch positive)
1)
SP Target position
AP Ac tual position
1)
a Offset “axis zero point (AZ)”
b Offset “project zero point ( PZ)”
c Offset “target/actual position ( TP/AP)”
d Optional: Offset “Software end position negative ( S LN)”
2)
e Optional: Offset “Software end position positive (SLP)”
2)
1 Effective positioning range
2 Working positioning range (no hardware limit switches)
1) Additional information page 161.
2) In the “Endless positioning” operational function, no limit switch can be parameterised.
Tab. 4.2 Measuring system for rotative drives
Additional information CD-ROM: Documentation “CMMS-AS_de.pdf/CMMS-ST_de.pdf/
CMMD-AS_de.pdf ” or the Festo Configuration Tool (FCT): Dynamic/static plug-in help.

 Loading...
Loading...






