6 Positioning mode
152 Festo – GDCP-CMMS/D-FW-EN – 1404NH – English
6.7 Interpolated positioning mode
6.7.1 Function: Interpolated positioning mode
The interpolated positioning mode (IP) permits specification of setpoint position values in a multi-axis
application of the motor controller. For this, synchronisation telegrams ( SYNC) and position setpoint
values are specified by a higher-order controller in a fixed time slot pattern (synchronisation interv al).
Since the interv al is normally greater than one position controller cycle, the motor controller (interpol-
ator) independently interpolates the setpoint values between two specified position values
Fig. 6.18.
The shortest synchronisation interval is 6.4 ms. This is also the default value in the inter-
polation_time_ period object ( 60C2
h
). The external position setpoint values are interpol-
ated internally in the 400 μs position controller cycle.
Recommendation for an optimal path interpolation:
• Set the sync interval in integer multiples of 400 μs, e.g. 8 ms, 10 ms, 12 ms, ...
For additional information “De vice profile CiA 402” description, GDCP-CMMS/D-C-CO-…
5
12
3
4
t
[ms]
s
[Inc]
-100
0
100
200
300
400
500
600
700
0 8 16 24 32 40 48 56 64 72 80
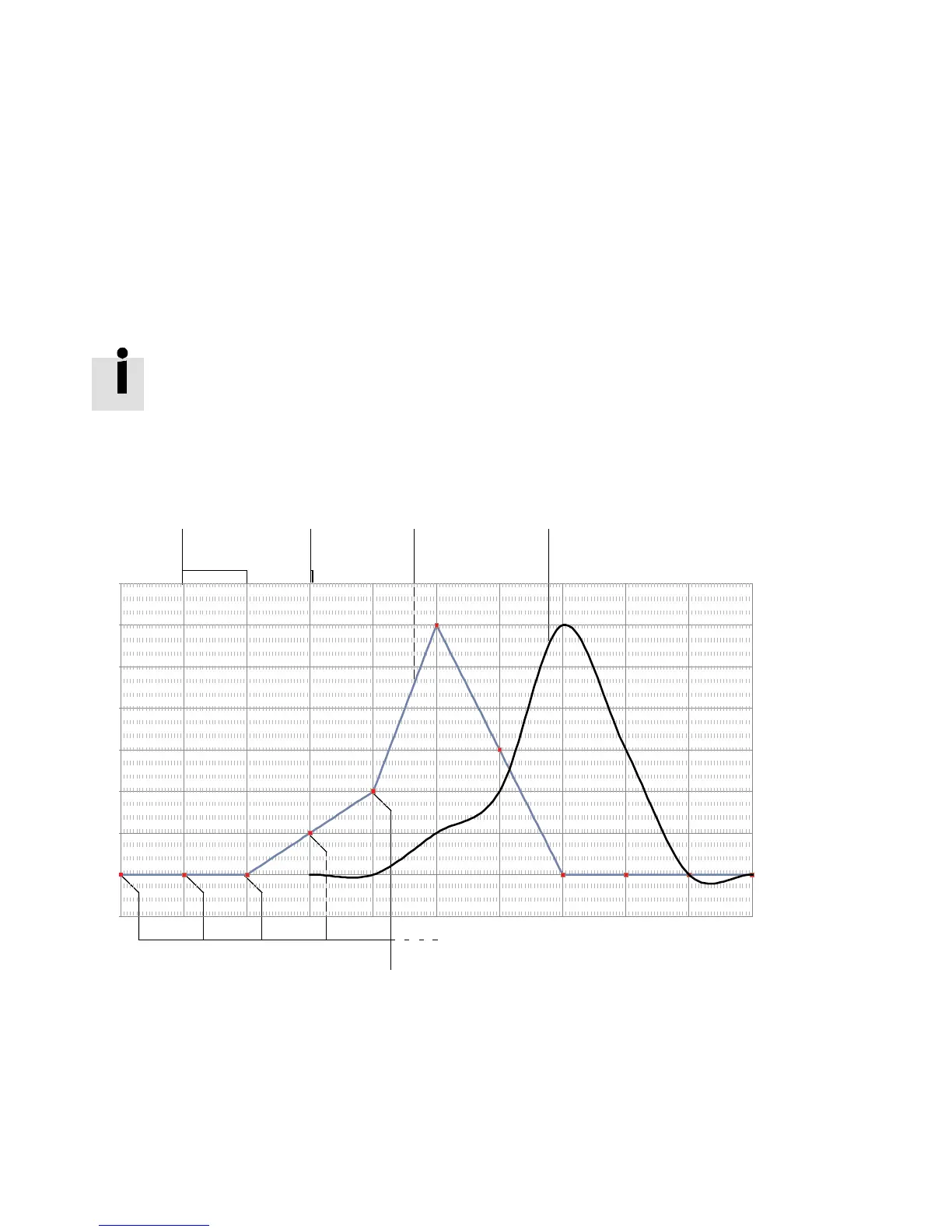
1 Interpolation cycle 8 ms
(preset by the controller)
2 Specification of the position setpoint values
3 Support points (in the interpolation cycle)
4 Position controller cycle 400 μs
5 Internal setpoint value of the position
controller in a 400 μs position controller
cycle
Fig. 6.18 Interpolated positioning mode

 Loading...
Loading...






