4. USER MENU
4-4
Counter rudder is usually not required for small boats. When your boat zigzags a lot
before settling in the new course, increase the counter rudder setting.
4.1.2 Trim gain
The NAVpilot continually monitors the boat's trim in order to keep the trim sensitivity
optimum. A lower setting is common because boat's trim usually does not change
quickly. A large number changes the trim compensation value more frequently. Too
high of a setting may result in the following problems.
• Trim sensitivity is over-affected, resulting that a trim appears in both port and star-
board directions alternately.
• Trim compensation mechanism responds to the yawing, resulting in more serious
oscillation of ship's heading.
Note: Trim gain is not available with Fantum Feedback
™
.
To automatically set the trim, do as follows:
1. Open the [Parameter Setup] menu.
2. Rotate the Course control knob to select the current setting for [Trim Gain] then
push the knob.
3. Rotate the Course control knob to select [Auto] or [Manual] then push the knob.
4. For [Auto] go to step 5. For [Manual], do as follows:
1) Rotate the Course control knob to select the current value and push the
knob.
2) Rotate the Course control knob to set a value then push the knob (setting
range: 1 to 20).
The default value is automatically calculated according to length of your boat,
entered on the [Ship’s Characteristics] menu at installation.
5. Press the key three times to close the menu.
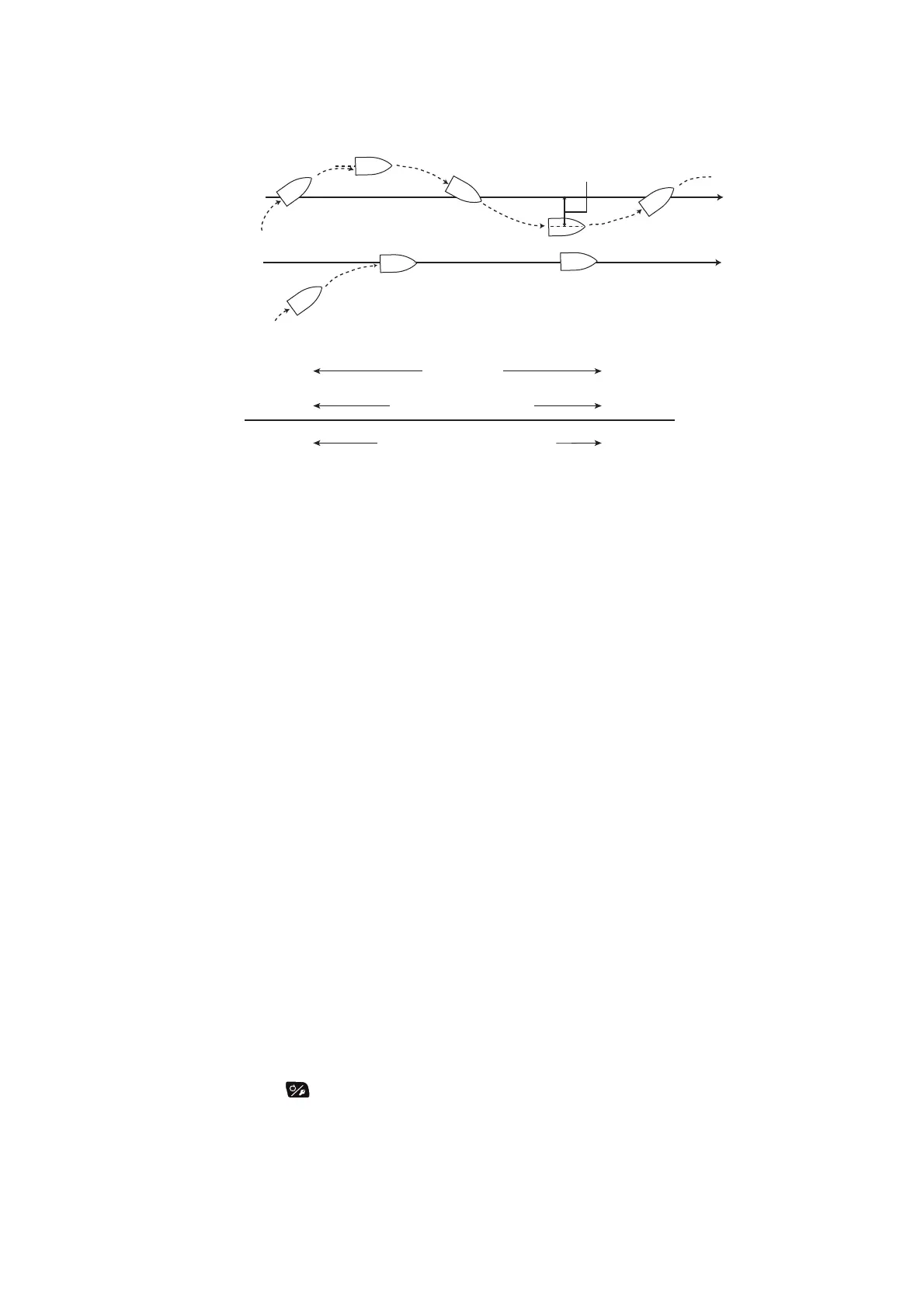
Counter rudder:
small setting
Counter rudder:
proper setting
Large course error
Intended
course
The counter rudder feature functions to smoothly
return ship's heading toward intended course.
Fast
Heavy
High
Slow
Light
Low
Speed
Load Condition
[Counter Rud.]

 Loading...
Loading...



