Operation
50940411/G0219 96 Printed in U.S.A.
Lift Arm Operation
Do not lift loads exceeding rated operating
capacity. See “Payloads/Capacities” on page 38.
Attachment Transport Position
Always transport loads in transport position to
minimize the possibility of tipping or rollover
accidents and unstable balance conditions that
can cause loss of control.
Carry materials 200-300 mm (8-12”) above the
ground, and adjust as necessary to clear obstacles.
Generally, carry the load as low as safely possible.
Tilt buckets back, as shown in Fig. 88, to prevent
spilling material.
t
Joystick Control Patterns
Always lock-out hydraulic functions by raising
the arm rests/safety bars whenever parking the
machine.
The control joysticks control lift arm raise and
lower, attachment tilt, optional attachment quick-
hitch lock, and auxiliary hydraulics flow control.
Two different control patterns are available for lift
arm operation: ISO and D-H. See “Control
Joysticks” on page 55 for information about
switching between ISO and D-H control patterns.
NOTE:
The D-H control pattern is an optional
feature.
ISO Pattern Lift Arm Operation Controls
ISO pattern lift arm operation is controlled
exclusively using the right control joystick (Fig. 89):
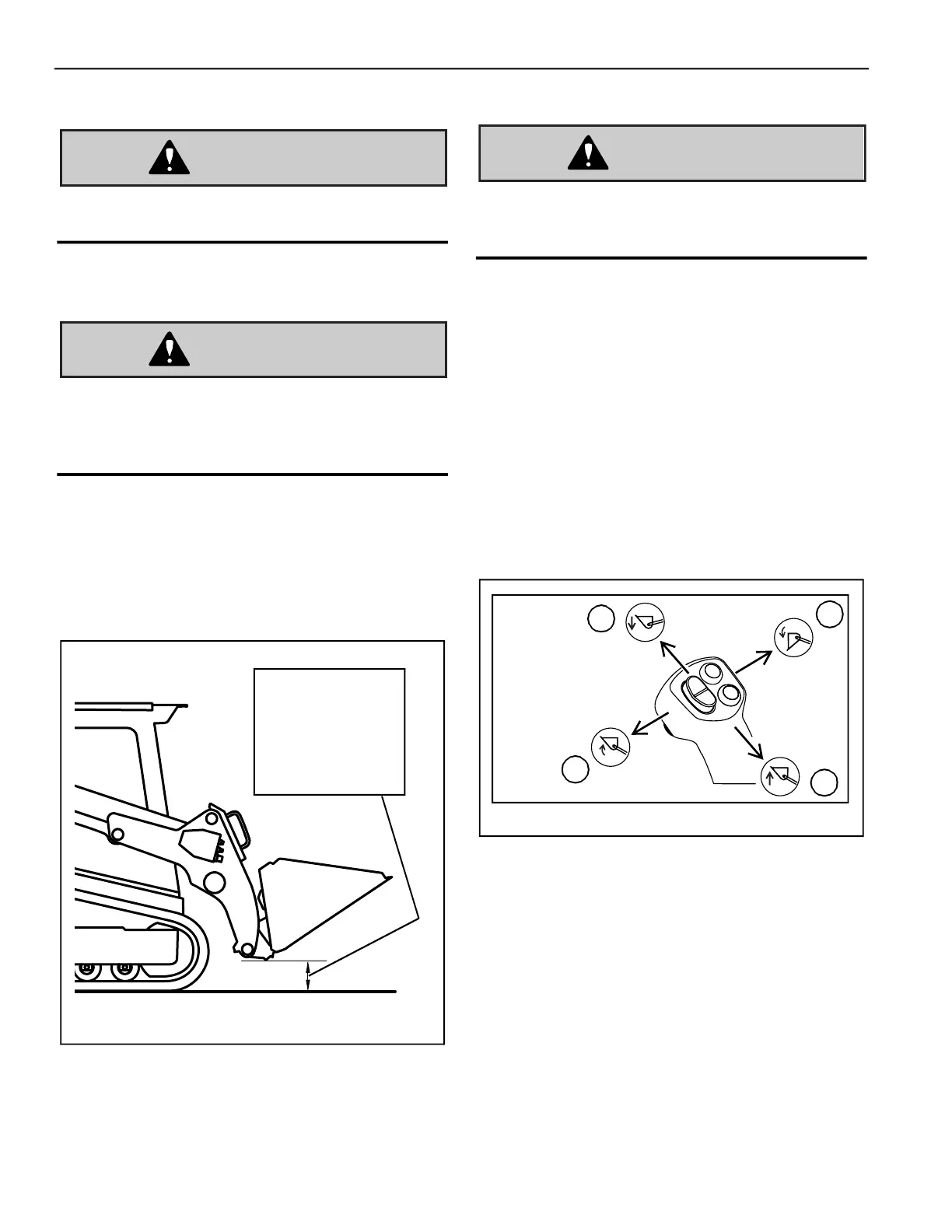
A. Push the right joystick forward to lower the
lift arm.
IMPORTANT:
The lift arm can be lowered if the
engine is off by turning the ignition key clock-
wise to the first detent and pressing the float
button on the right joystick (See “Lift Arm Float”
on page 99).
B. Pull the right joystick backward to raise the
lift arm.
Fig. 88 – Transport Position
• 200-300 mm (8-12”)
above ground,
adjusted to clear
obstacles.
• As low as safely
possible.
Fig. 89 – ISO Pattern Lift Arm Operation
ISO
Control
Pattern
(Right
Joystick)
C
A
B
D