Safely-limited speed (SLS)
This funcon monit
ors the parameterized speed limits.
Up to four speeds can be parameterized and monitored simultaneously.
DANGER!
Uncontrolled r
otaon of the motor possible if no safety rated encoder system is used.
Possible consequence: Death or severe injuries
▶
Use a safety rated encoder system to use this funcon.
Precondions
The drive must be braked by the applic
aon.
Note when you combine the Safely-limited speed (SLS) and Safe direcon (SDI) funcons.
•
The parameterized direcons of movement must be coordinated:
•
SLS: 0x28C4:001 ... 0x28C4:004
•
SDI: 0x28BA:001
•
SLS braking me and SDI deceleraon me must be coordinated:
•
SLS: 0x28C3:001 ... 0x28C3:004
•
SDI: 0x28BA:002
•
The SLS deceleraon me starts simultaneously with the SDI deceleraon me.
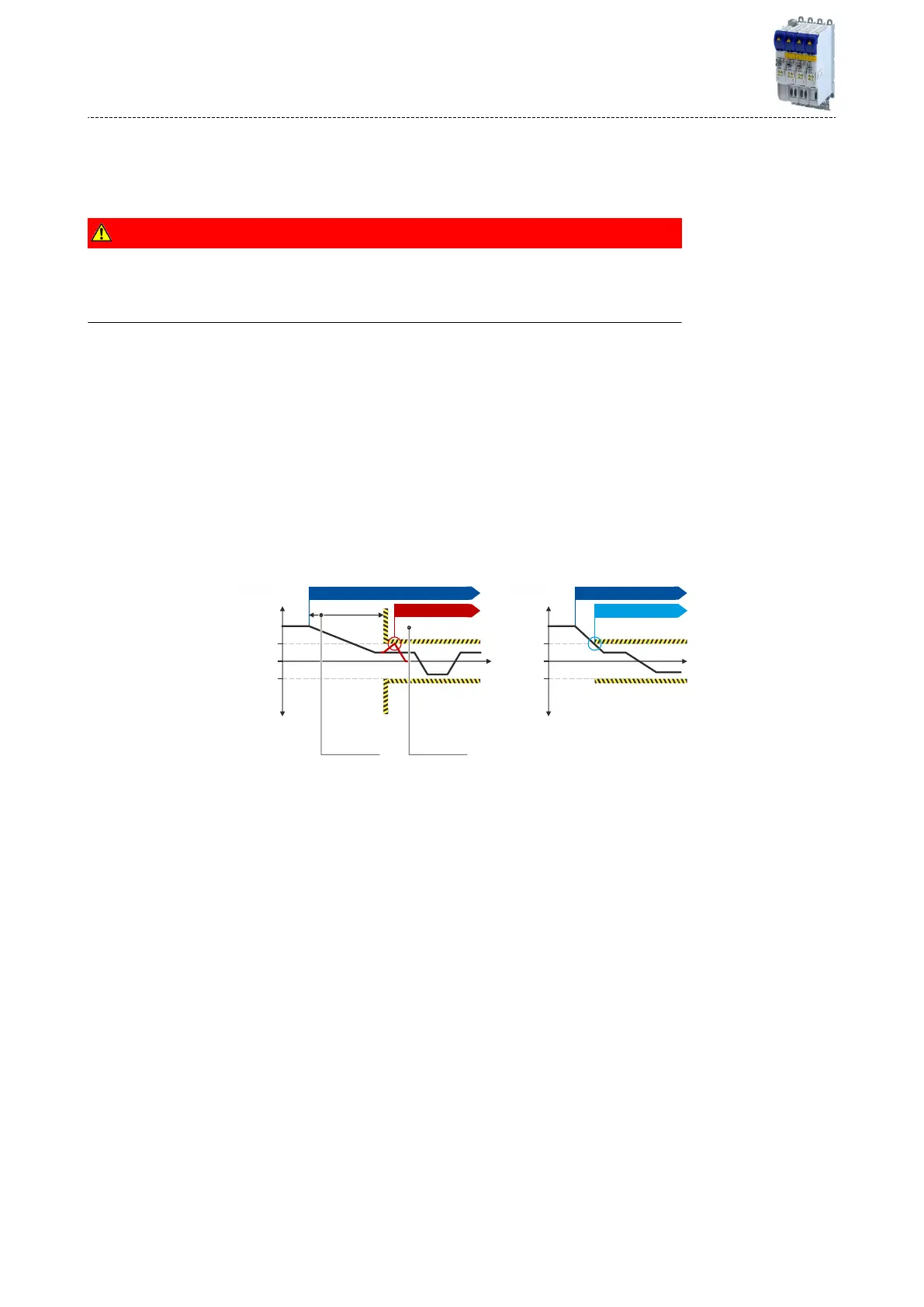
Funconal descripon
t
0
SLS
n
Nlim
STO/SS1/SS2
-Nlim
t
0
SLS
n
Nlim
SLS observed
-Nlim
0x28C3:001 ...
0x28C3:004
0x28C5:001 ...
0x28C5:004
Fig. 18: SLS funcon
The funcon monit
ors the speed limits of the drive: 0x28C2:001 ... 0x28C2:004
Monitoring becomes acve when the set braking me has elapsed or when the speed falls
below the set speed limit:
•
Braking me: 0x28C3:001 ... 0x28C3:004
•
Safely limited speed: 0x28C2:001 ... 0x28C2:004
In addion, the permissible direcon of movement can be monitored: 0x28C4:001 ...
0x28C4:004
If the speed of the drive is within the monitoring limits, the SLS1 observed ... SLS4 observed
status is output.
•
St
atus word: 0x2870:002 Bit 0 ... 0x2870:002 Bit 3.
Acvaon of the funcon
•
Via the safety bus. 4Safe network interfaces ^ 149
•
Via internal status signals.
Funconal sa
fety
Safety funcons
Safely-limited speed (SLS)
128

 Loading...
Loading...





