IMPULSE•G+ Mini Advanced Instruction Manual – March 2014
5-35
Automatic Slip Compensation
As the load becomes larger, the motor speed is reduced and the motor slip increases. The slip
compensation function keeps the motor speed constant under varying load conditions. D02.01 sets
the slip compensation gain. When the gain is “1.0”, the output frequency is increased by 1% of the
E01.06 setting at rated current. A setting of “0.0” results in no slip compensation.
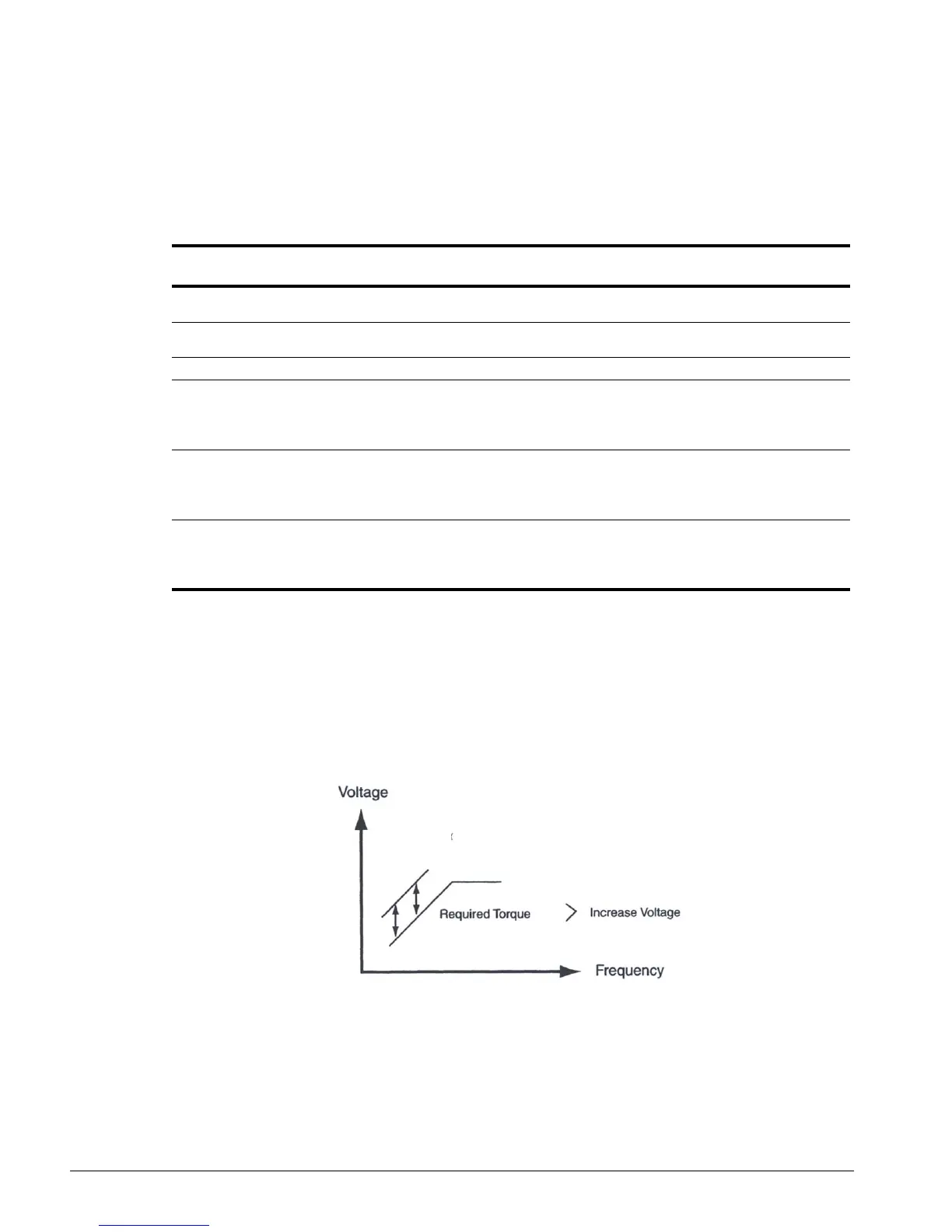
Torque Compensation
The motor torque requirement changes according to load conditions. Full-range automatic torque
boost adjusts the voltage of the V/f pattern according to the required torque. The IMPULSE•G+
Mini automatically adjusts the voltage during constant-speed operation as well as during
acceleration. See below, Figure 5-21.
Figure 5-21: Torque Characteristics
The required torque is calculated by the inverter. This ensures trip-less operation and power savings.
Output voltage Torque compensation gain x Required torque
Parameter
Code Name Function Range Initial Value
Access
Level
D02.01 Slip Compensation Gain Slip compensation multiplier. 0.0–2.5 1.0 (OLV)
0.0 (V/f)
Adv
D02.02 Slip Compensation Time Slip compensation primary
delay time
0–10000 ms 200 (OLV)
2000 (V/f)
Adv
D02.03 Slip Compensation Limit Slip compensation limit 0–250% 200 Adv
D02.04 Slip Compensation
Regen
Slip compensation during
regeneration
00 Disabled
01 Enabled
00, 01 00 Adv
D02.05 Slip Compensation V/f Slip Compensation at V/f
setting
00 Include
01 Exclude
00, 01 00 Adv
D02.06 Magnetic Flux
Characteristic
Magnetic Flux Characteristic
Calculation
00 Include
01 Exclude
00, 01 00 Adv