18. Interface specifications
MiR600 User Guide (en) 08/2021 - v.1.0 ©Copyright 2021: Mobile Industrial Robots A/S. 229
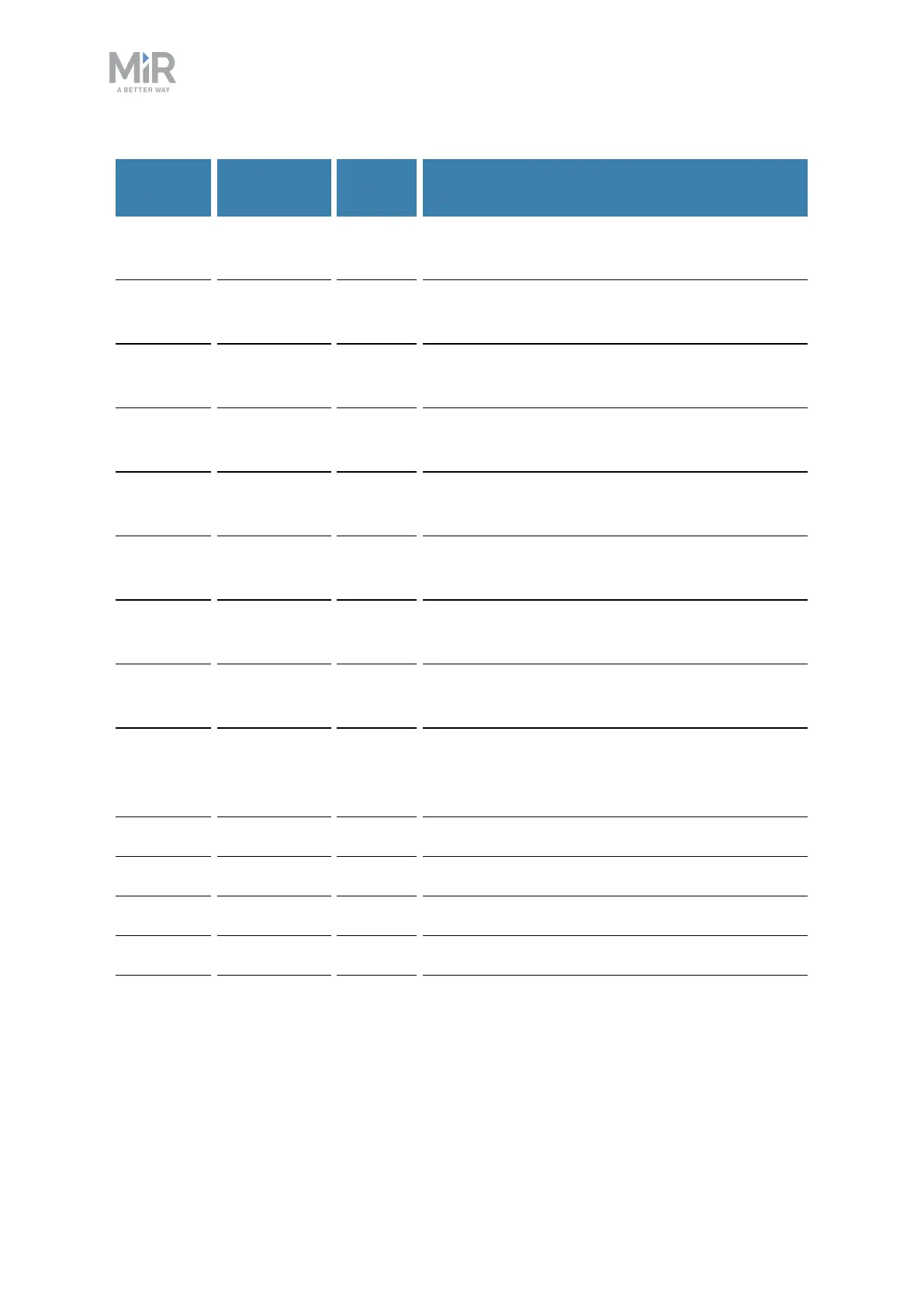
Pin
number
Signal
name
Type Description
stop 2 If pins are unequally set for a period greater
than three seconds, the robot must be restarted.
5 Locomotion
1
Output Active when the robot is standing still.
6 Locomotion
2
Output Active when the robot is standing still.
7 System E-
stop out 1
Output Inactive when the robot is in Emergency stop.
8 System E-
stop out 2
Output Inactive when the robot is in Emergency stop.
9 System E-
stop in 1
Input When inactive, the robot enters Emergency
stop.
10 System E-
stop in 2
Input When inactive, the robot enters Emergency
stop.
11 Reduced
speed
Input When inactive, the robot cannot drive faster
than 0.3 m/s .
12 Shelf mode Input When active, the robot checks for shelf legs if
pin 11 is also active. Is only intended to be used
with MiRShelfLift
13 Unassigned Unassigned.
14 Unassigned Unassigned.
15 Safe RTN Ground Safe return.
16 Unassigned Unassigned.
17 Unassigned Unassigned.