9. Navigation and guidance system
MiR600 User Guide (en) 08/2021 - v.1.0 ©Copyright 2021: Mobile Industrial Robots A/S. 89
• The cameras are not reliable at determining depth when viewing structures with
repetitive patterns.
• The cameras may detect phantom obstacles if they are exposed to strong direct light.
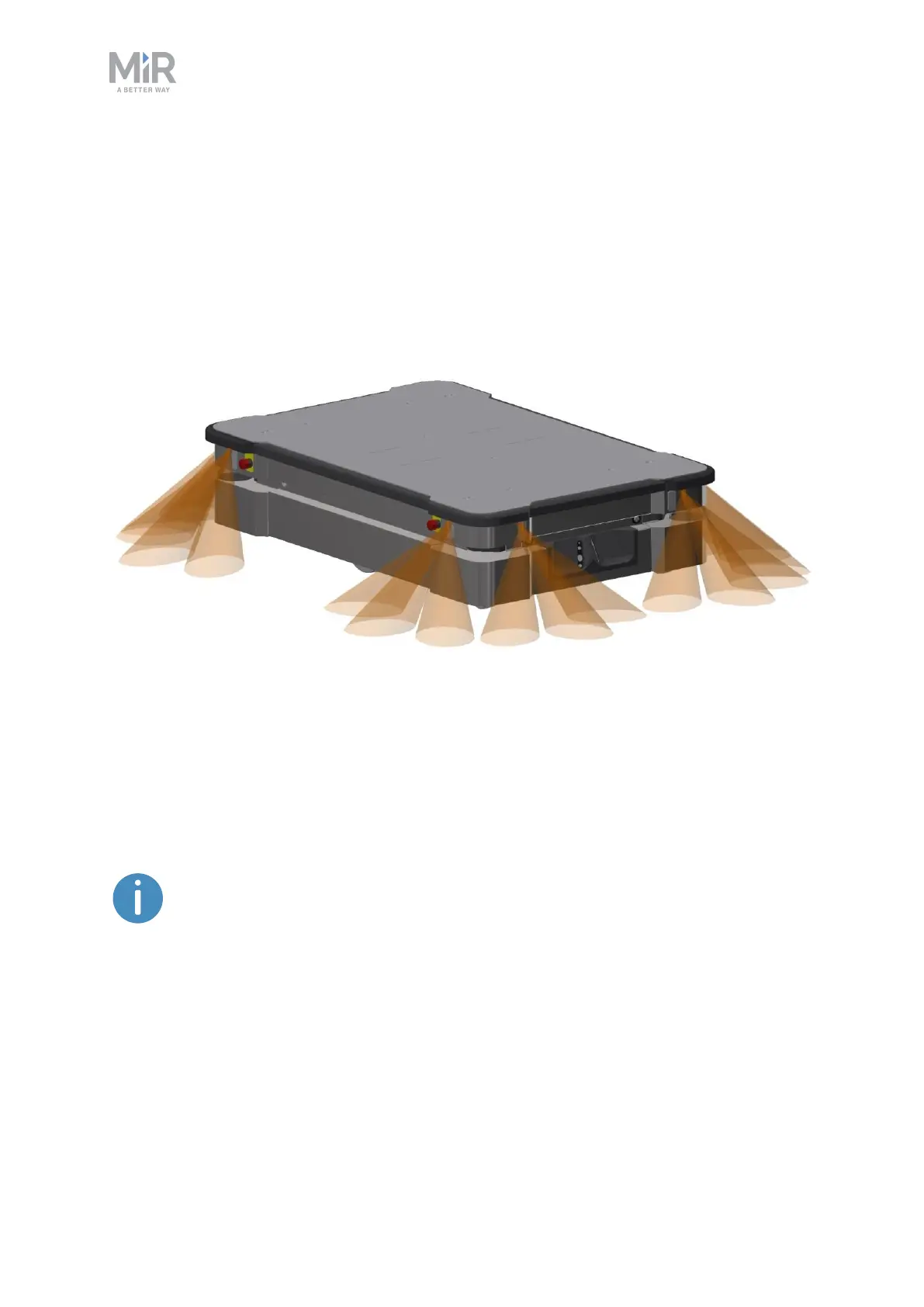
Proximity sensors
Using infrared light, the proximity sensors point downwards and detect low objects around
the corners of the robot outside the field of view of the safety scanners and 3D cameras.
Figure 9.9. The proximity sensors in the corners of the robot detect objects below the safety laser scanners'
plane of view.
The main purpose of the proximity sensors is to detect low objects, such as pallets and
forklift forks, placed close to the robot while it is standing still.When the robot begins to
drive, it plans a path around the nearby detected obstacles.
The proximity sensors are disabled by default. To make the robot use the
proximity sensor data, you must enable the sensors and calibrate them.For
more information, contact your distributor for the guide How to calibrate the
proximity sensors.