2. Product presentation
MiR250 Hook Integrator Manual (en) 12/2023 - v.3.0 ©Copyright 2021–2023: Mobile Industrial Robots A/S. 30
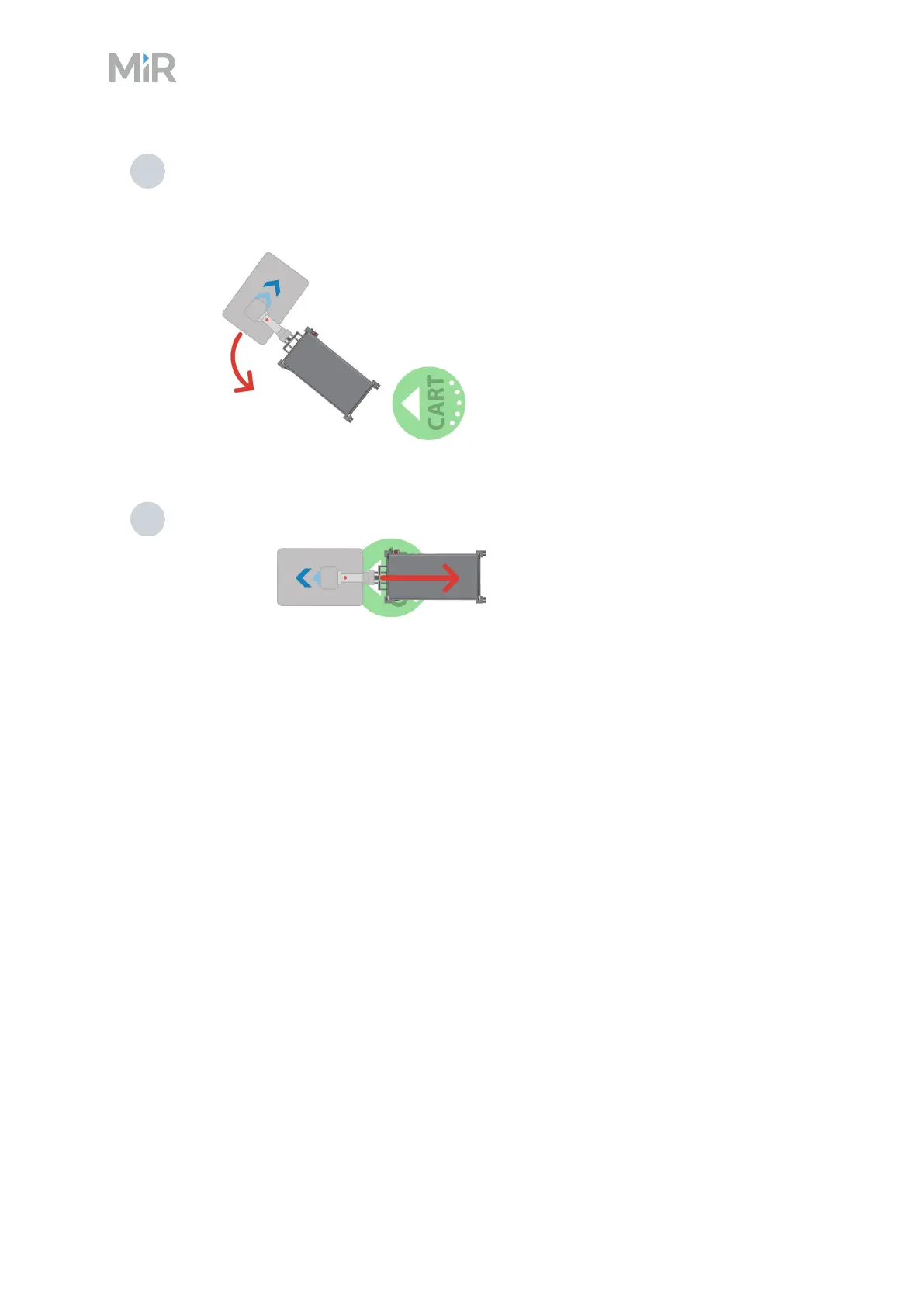
4 The robot now drives in reverse with the cart so the cart is parallel to the direction of
the Cart position.
5 The robot straightens up, and reverses with the cart into the Cart position.
When reversing with a cart, the robot will warn with both a loud beeping sound and a flashing
orange light.
Reverse methods
There are three different methods you can select when making the robot place a cart in reverse:
l
Fast: The robot uses the most space in front on the Cart position, but less space to the sides,
and places the cart faster than when using the other methods.
l
Compact: The robot uses the least space in front on the Cart position, but more space to the
sides, and places the cart slower than when using the other methods. This method is especially
intended for confined corridors.
l
Standard: The robot docks using a method between the Fast and Compact methods.
It is best to test each method to see which works best for eachCart position. The performance
depends significantly on the operating environment.