8. Safety-related functions
MiR250 Hook Integrator Manual (en) 12/2023 - v.3.0 ©Copyright 2021–2023: Mobile Industrial Robots A/S. 110
8. Safety-related functions
The robot's safety system is designed to mitigate significant hazards which could lead to injury.
For an overview of all the safety functions, see "Safety functions overview" on the next page.
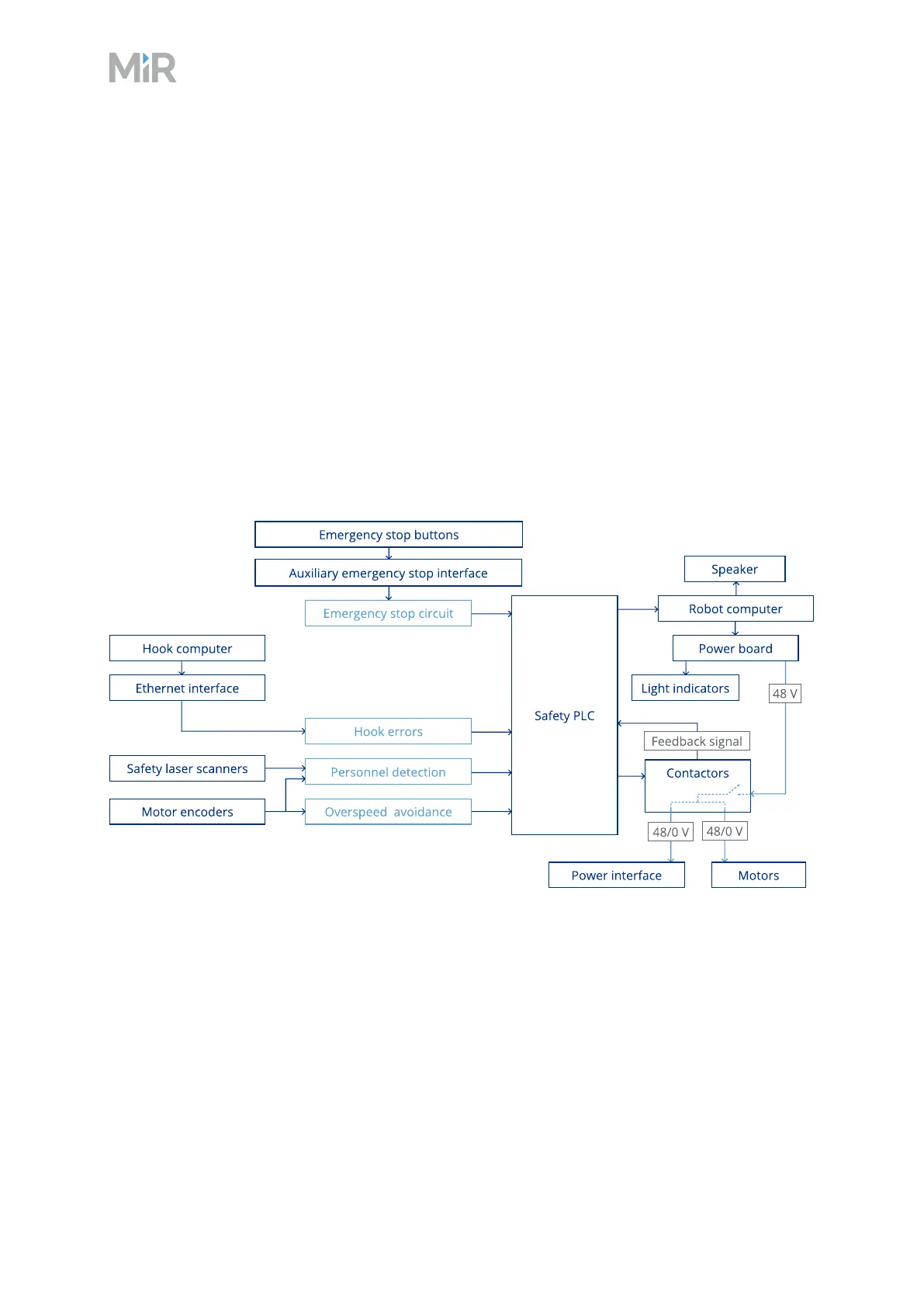
The diagram in Figure 8.1 shows the inputs to these functions and how they are all connected and
monitored in the safety PLC. The safety PLCis able to switch the safety contactors to cut off
power to the robot motors and the top module whenever a Protective or Emergency stop is
triggered—see "Types of stop" on page91. Also, the safety PLCsends information to the robot
computer. The robot computer displays the information in the robot interface (in Monitoring >
Hardware health) and indicates if the robot is inEmergency or Protective stop with the status
lights.
Figure 8.1 Overview of components involved in each safety function and interface