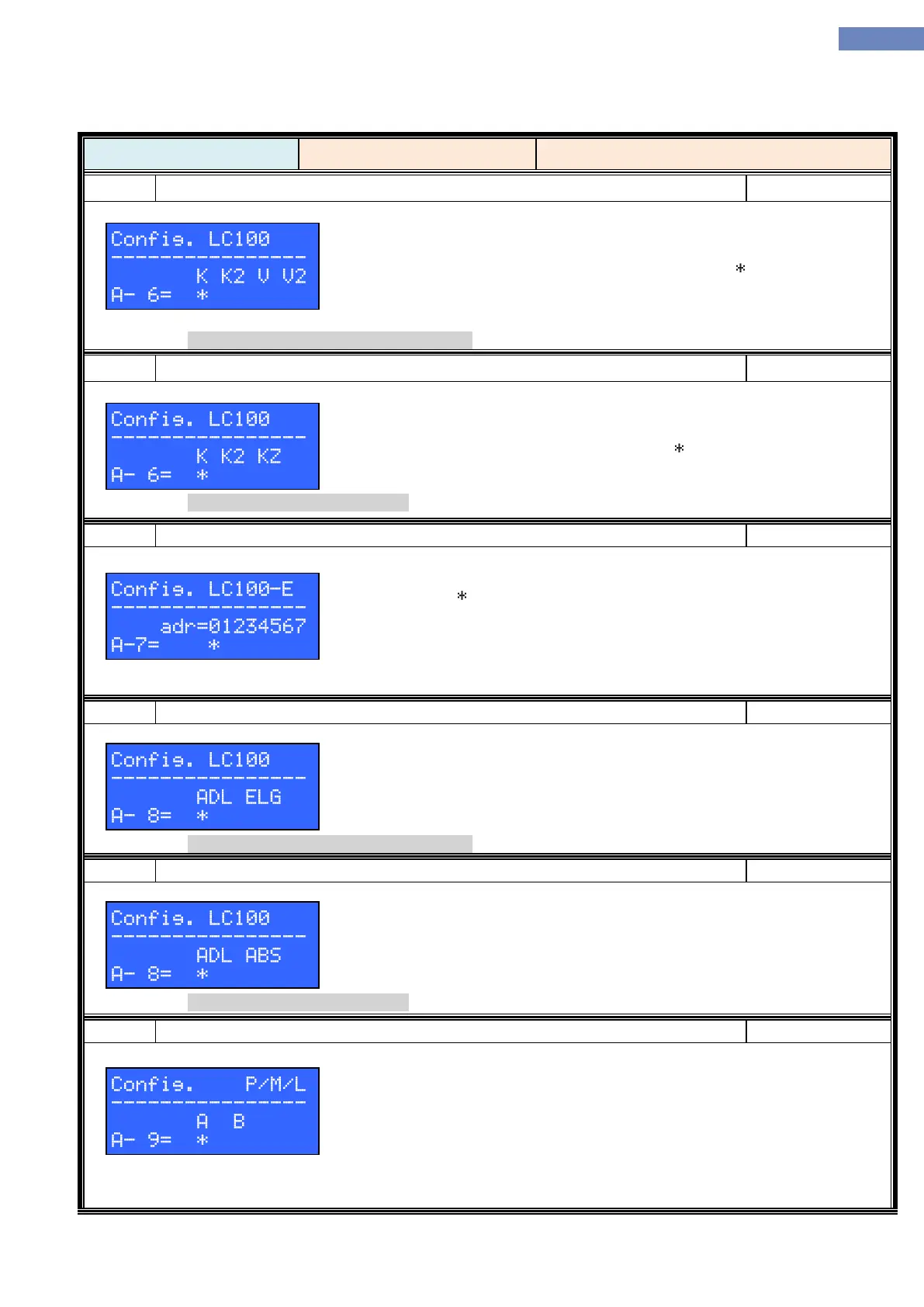
Parameter to include the LC100-K, LC100-K2, LC100-V, LC100-V2 bord into
system. If there exist bord connected to CAN bus it needs to be included through
A-6 parameter. Including is done by placeing the sign „ “ under the „board“
character.
for software version less than 4.410.00
Parameter to include the LC100-K, LC100-K2, LC100-KZ bord into system. If
there exist bord connected to CAN bus it needs to be included through A-6
parameter. Including is done by placeing the sign „ “ under the „board“ character.
In firmware 4.410.00 or newer.
Parameter to include LC100-E board into the system. Including is done by
placeing the sign „ “under the „board“ character. (list below)
0 – LC100-E0 4 – LC100-E1 (FC)
1 – LC100-E1 5 – LC100-E1 (FD)
2 – LC100-E0 (FC) 6 – LC100-K (FC)
3 – LC100-E0 (FD) 7 – LC100-K (FD)
Parameter to include ADL inverter or ELGO absolute position system into the
system.
for software version less than 4.410.00
Parameter to include ADL inverter or absolute position system into the system.
In firmware 4.410.00 or newer.
Parameter to include P or M modules and choosing the function on the input pins
X3:2 and X3:3 on P or M modules.
A – Landing call side A
B – Landing call side B
When there is no function active (there is no P or M modules) landing calls must be set through configurations
parameters.