7 - 39
7 Parameter Details
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
7-5 Interface Monitor Setting Parameters
7
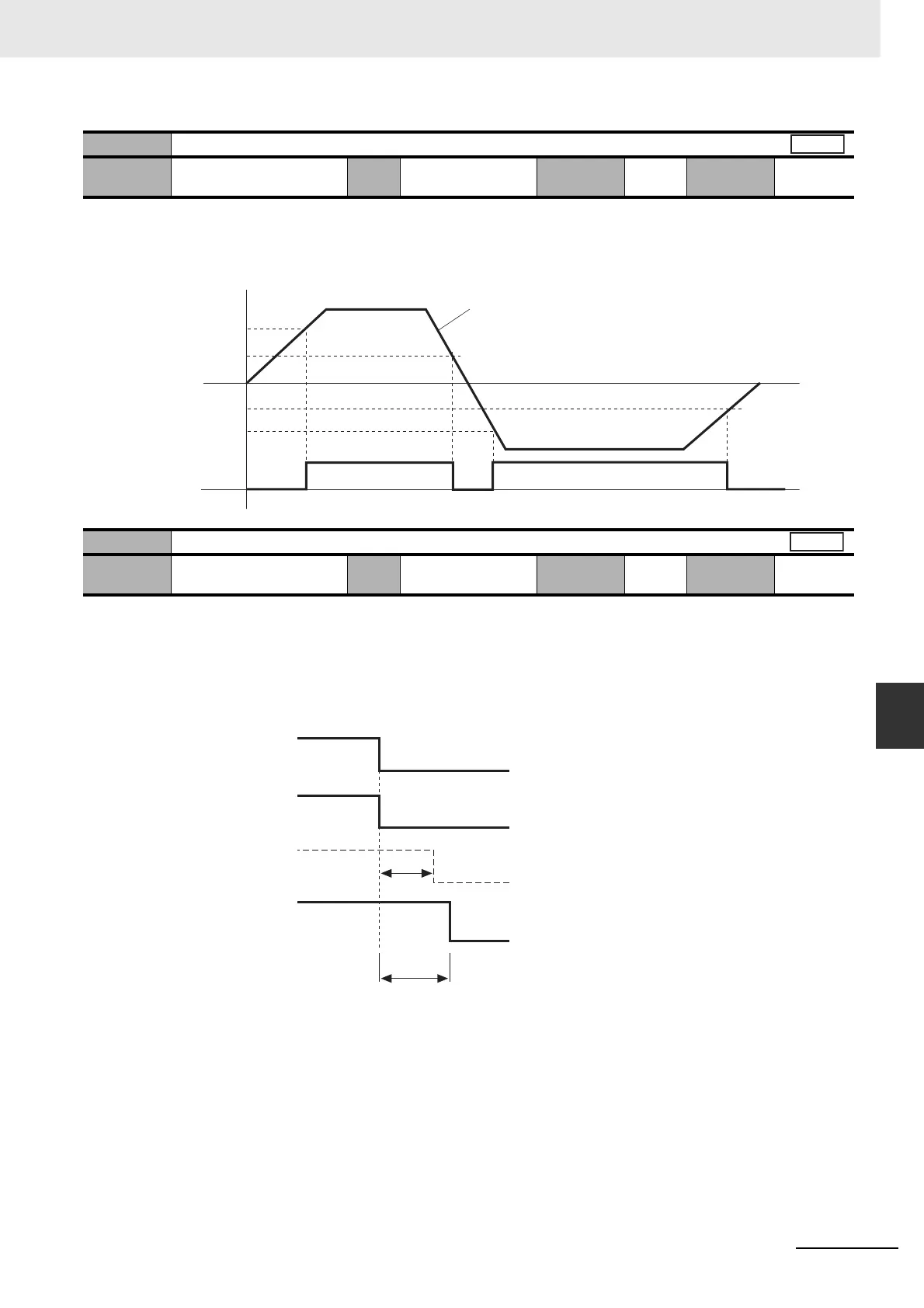
• Motor rotation speed detection output signal is output when the motor speed reaches the speed set
as the achieved speed.
• This setting has a hysteresis of 10 r/min for detection.
• Set the time required for the Servomotor to be de-energized (servo free) after the Brake Interlock
Output (BKIR: CN1 pin 10) turns OFF (i.e., brake held), when servo OFF status is entered while the
Servomotor is stopped.
• When the Operation Command (RUN) turns OFF while the Servomotor is stopped, the Brake
Interlock Output (BKIR) turns OFF, and the Servomotor is de-energized after waiting for the set time
(set value x ms).
Make the setting as follows to prevent the machine (workpiece) from moving or falling due to the
delay time in the brake operation (tb).
Brake Timing when Stopped (set value x 1 ms) ≥ tb
• For details, refer to 6-6 Brake Interlock on page 6-18.
Pn436
Rotation Speed for Motor Rotation Detection
Setting
range
10 to 20,000 Unit r/min Default
setting
1,000
Cycle the
power supply
–
Pn437
Brake Timing when Stopped
Setting
range
0 to 10,000 Unit 1 ms Default
setting
0
Cycle the
power supply
–
Speed
Speed [r/min]
Motor Speed
Time
Pn436+10
Motor rotation speed
detection output
Pn436–10
– (Pn436–10)
– (Pn436+10)
OFF OFFON ON
Speed
Operation command
(RUN)
Brake interlock
output (BKIR)
ctual brake
Motor power
is supplied
Released
Released
Power
supply
Held
No powe
supply
Pn437
tb
Held

 Loading...
Loading...





