9 Adjustment Functions
9 - 2
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
9-1 Gain Adjustment
OMNUC G5-series (Pulse-train Input Type) Servo Drives provide a realtime autotuning function. With
this function, gain adjustments can be made easily even by those who use a servo system for the first
time. If you cannot obtain the desired responsiveness with autotuning, use manual tuning.
The Servo Drive must operate the motor in response to commands from the host system with minimal
time delay and maximum reliability. The gain is adjusted to bring the actual operation of the motor as
close as possible to the operation specified by the commands, and to maximize the performance of the
machine.
Example: Ball screw
Note 1 Take sufficient measures to ensure safety.
2 If vibration (unusual noise or vibration) occurs, immediately turn OFF the power supply or turn OFF the servo.
9-1-1 Purpose of the Gain Adjustment
9-1-2 Gain Adjustment Methods
Function Description
Reference
page
Automatic
adjustment
Realtime autotuning Realtime autotuning estimates the load inertia of the machine
in realtime and automatically sets the optimal gain according
to the estimated load inertia.
P. 9 - 4
Manual
adjustment
Manual tuning Manual adjustment is performed if autotuning cannot be
executed due to restrictions on the control mode or load
conditions or if ensuring that the maximum responsiveness
matching each load is required.
P.9-11
Basic procedure Position control mode adjustment P.9-12
Internally set speed control mode adjustment P.9-13
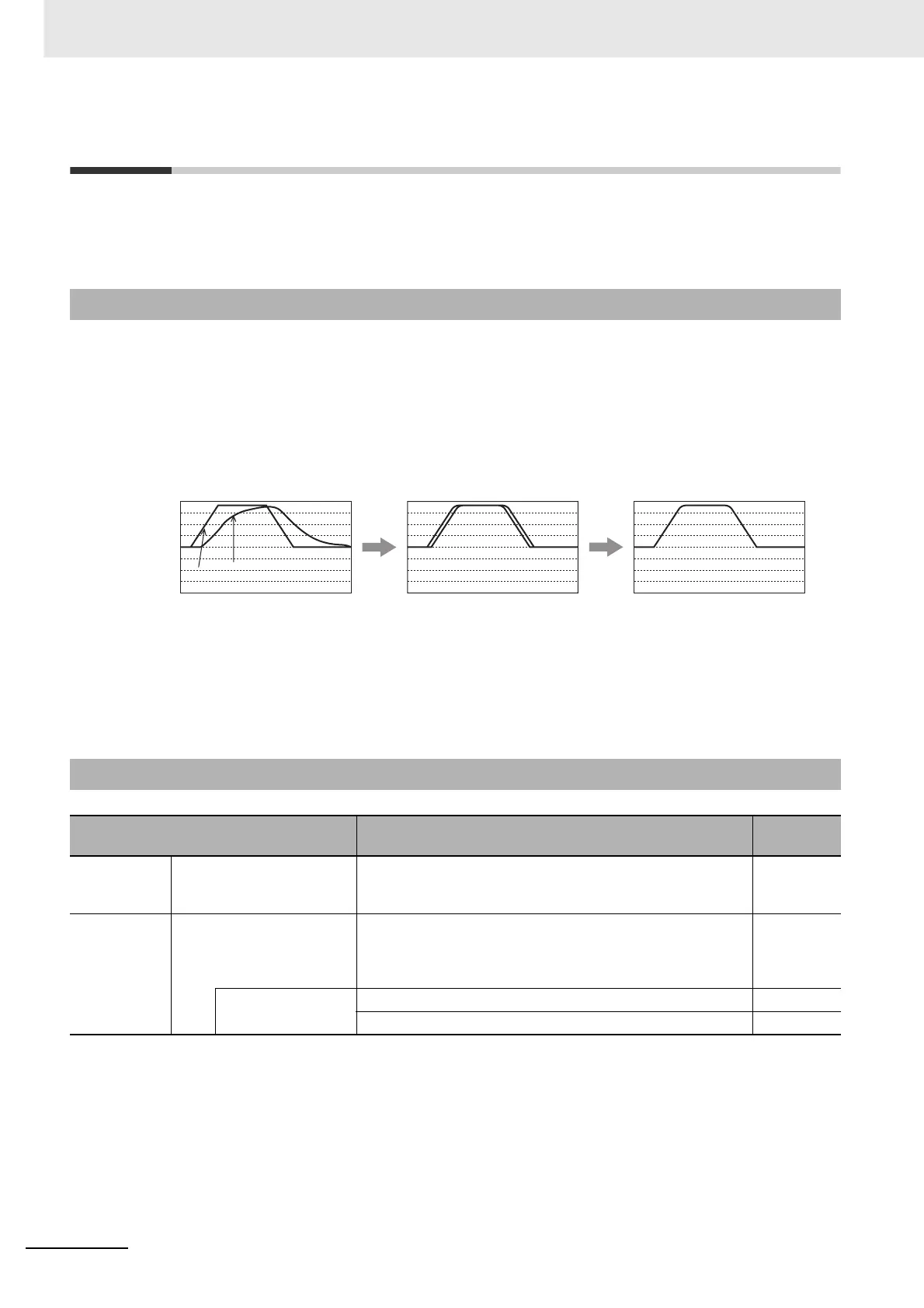
Position loop gain :
Speed loop gain :
Speed loop integral time constant
:
Speed feed-forward :
Inertia ratio :
20
30
50
0
300
Position loop gain :
Speed loop gain :
Speed loop integral time constant
:
Speed feed-forward :
Inertia ratio :
70
50
30
0
300
Position loop gain
:
Speed loop gain :
Speed loop integral time constant
:
Speed feed-forward :
Inertia ratio :
100
80
20
500
300
+2000
–2000
0
0.0 375250125 0.0 375250125 0.0 375250125
[r/min]
Command speed
Actual motor speed
Gain setting: Low Gain setting: High
Gain setting: High + feed-forward setting

 Loading...
Loading...





