6 - 21
6 Applied Functions
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
6-6 Brake Interlock
6
6-6-4 Operation
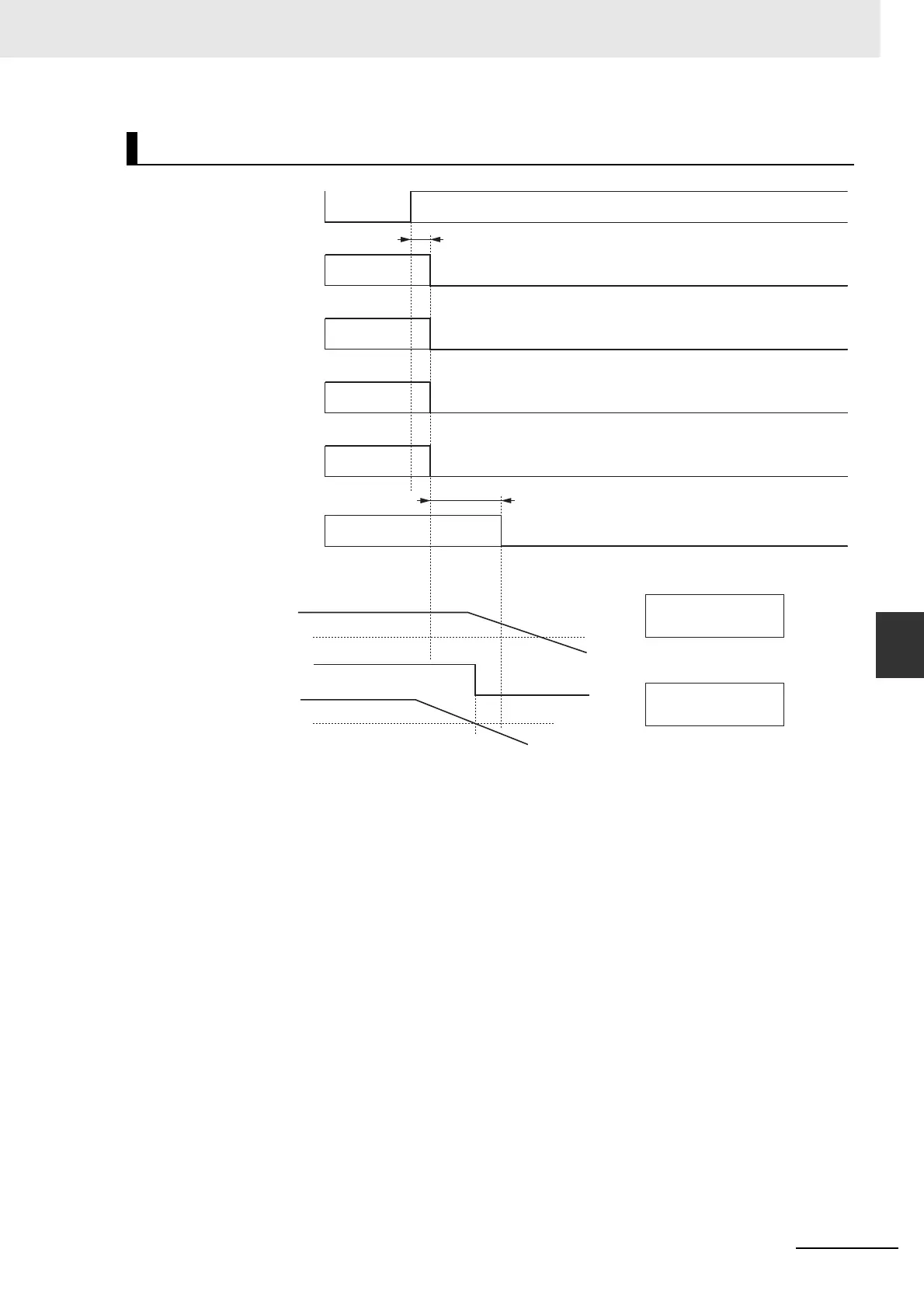
*1 The operation of the dynamic brake when there is an alarm depends on the set value in Stop Selection with
Servo OFF (Pn506).
*2 “t1” is the time set in the Brake Timing During Operation (Pn438), or the time until the motor speed drops to the
setting speed or lower in Brake Release Speed Setting (Pn439), whichever is shorter.
Note 1 Even when the Servo ON input is turned ON again while the motor is decelerating, the system does not
enter the servo ON state until the motor stops. The Brake Interlock Output (BKIR) signal is allocated to the
general-purpose output (CN1).
2 If the main circuit power supply turns OFF while the motor is operating, a phase loss alarm or main circuit
voltage low alarm will occur, in which case this operation timing is applied.
Operation Timing When an Alarm Occurs (Servo ON)
larm occurs
OFF
ON
0.5 to 5 ms
Motor power supply
Dynamic brake
Brake interlock
output (BKIR)*
2
Brake interlock
output (BKIR)*
2
Normal
Alarm output
ON
OFF
Released
Engaged
ON
OFF
ON
OFF
ON
OFF
Release request
No power supply
DB released DB released*
1
READY
Servo ready
completed output
(READY)
larm output (ALM)
Alarm
Brake held
Pn438
When Pn438 set
value comes earlier
t1
When Pn439 set value
or lower comes earlier
Release
request
Brake held
Pn439 set value
Rotation speed B
BKIR
Power supply
Rotation speed A
Pn439 set value

 Loading...
Loading...





