10-23
Para
me-
ter
No.
Ref-
er-
ence
page
Chan-
ges dur-
ing
opera-
tion
Defaul
t set-
ting
Unit
of
set-
ting
Set-
ting
range
DescriptionNameReg-
ister
No.
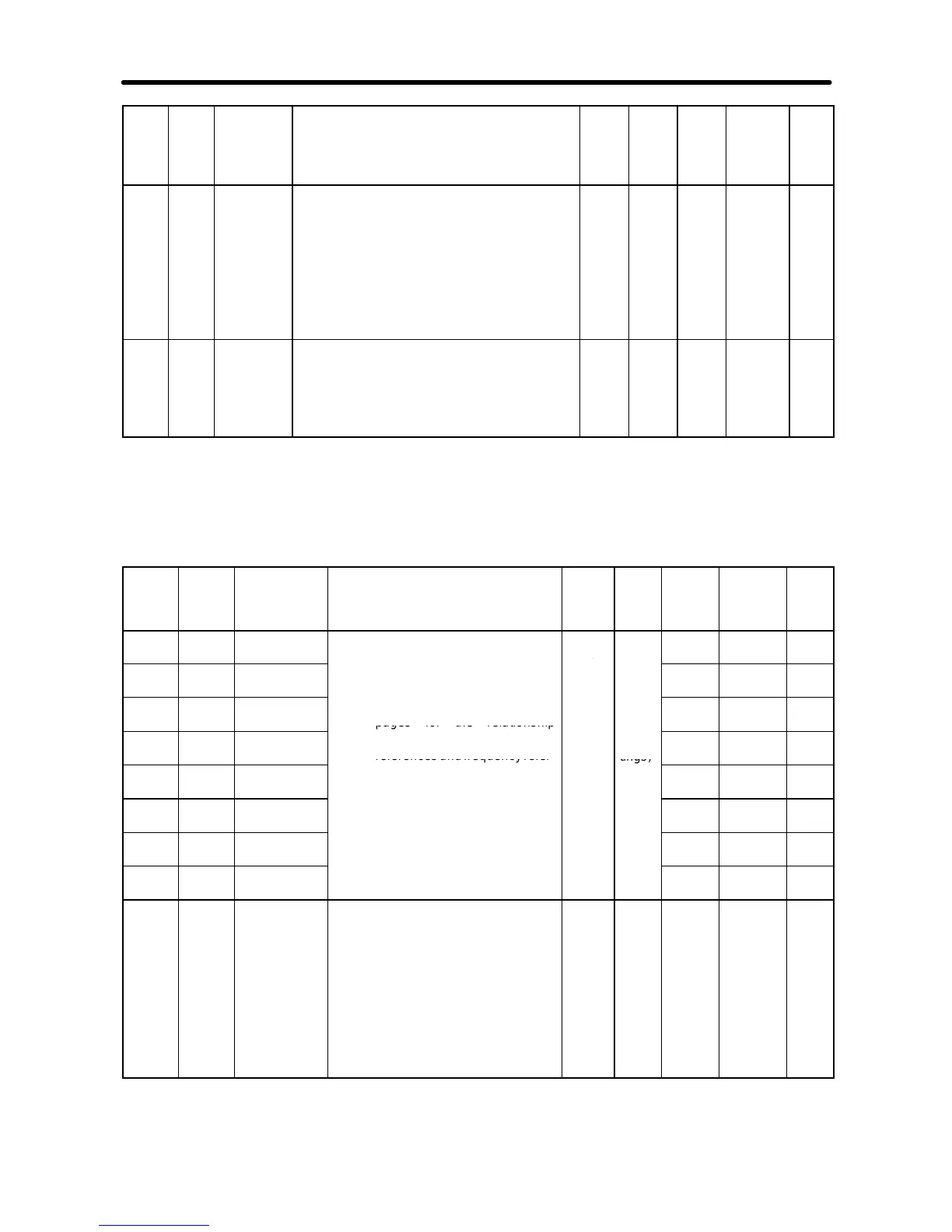
n118 0176 Undertor-
que detec-
tion level
Sets undertorque detection current level. (In-
verter rated current=100%)
If detection by torque is selected (n097), motor
rated torque becomes 100%.
Overtorque detection function selection 2
(n097) is used both for overtorque and under-
torque detection.
Note Applicable for software version
No. 010024 or later.
0 to
200%
1% 10%
n119 0177 Undertor-
que detec-
tion time
If time in which motor current falls below the
undertorque detection level (n118) is longer
than undertorque detection time, the undertor-
que detection function operates.
Note Applicable for software version
No. 010024 or later.
0.1 to
10.0
sec
0.1
sec
0.1
sec
H Function Group 4 (n120 through n179)
Param-
eter
No.
Regis-
ter No.
Name Description Set-
ting
range
Unit
of
set-
ting
Default
setting
Changes
during
opera-
tion
Ref-
er-
ence
page
n120 0178 Frequency
reference 9
Set the internal frequency references.
0.00 Yes 5-20
n125 017D Frequency
reference 14
0.00 Yes 5-20
n126 017E Frequency
reference 15
0.00 Yes 5-20
n127 017F Frequency
reference 16
0.00 Yes 5-20
n128 0180 PID control
selection
Selects the PID control method.
0: PID control disabled.
1 to 8: PID control enabled.
Note The derivative control method
(i.e.,thederivativecontrolofthe
deviation or detected value),
the addition of the frequency
reference, and the positive or
negative characteristics of PID
control are selectable.
0 to 8 1 0 No 6-18
List of Parameters Chapter 10