Setting Measurement Items
ZFX-C User’s Manual
3
SETTING THE MEASUREMENT CONDITIONS
77
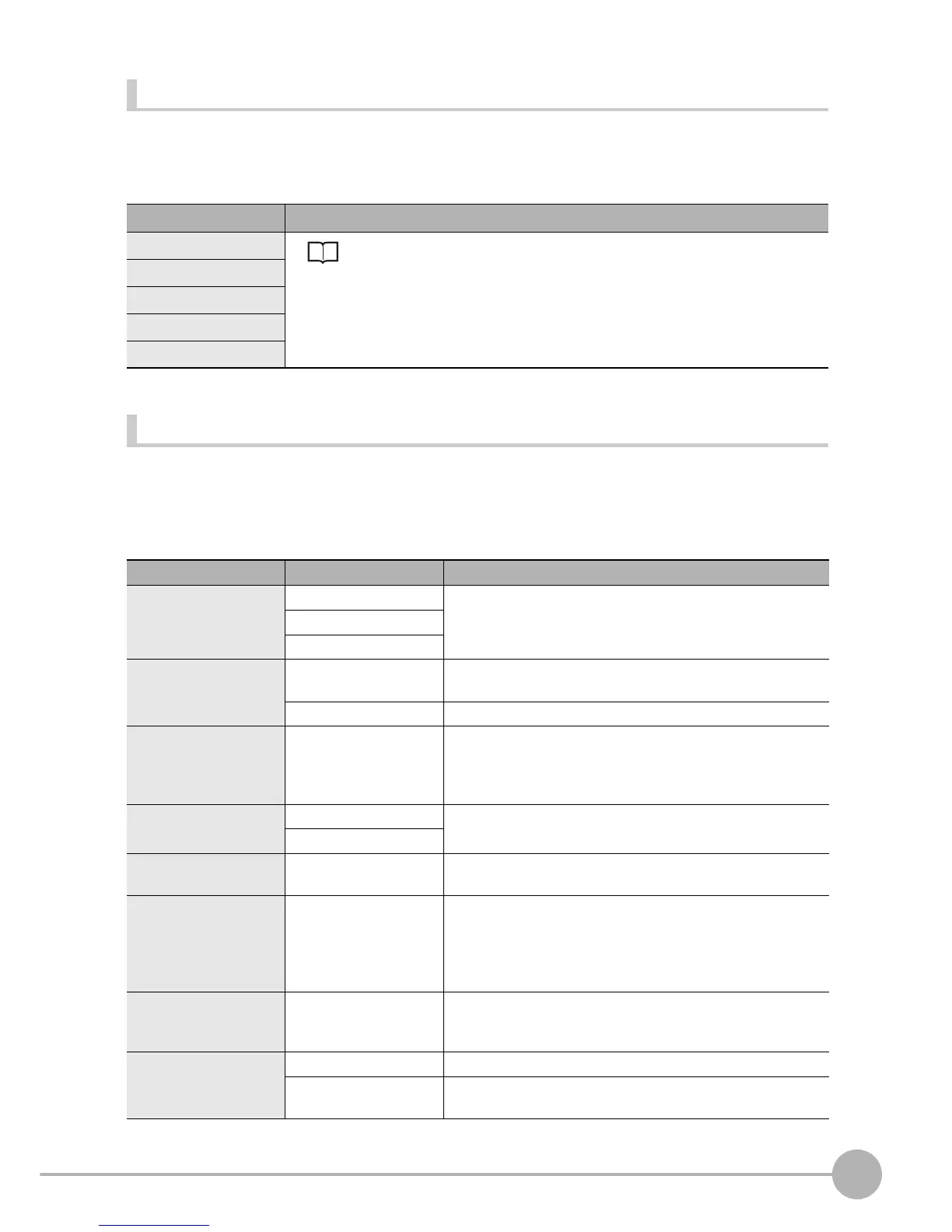
Image adjustment (if necessary)
The following items can be changed and set to the image of the measurement target.
X MENU mode - [Setup] - [Item] - [Img Adj]
Detailed settings (if necessary)
When measurement is not stable, adjust the detailed conditions. By the automatic setting, the edge search
color is automatically set.
X MENU mode - [Setup] - [Item] - [Detail]
Item Description
Select camera
For details, see "Image Adjustment". p.99
Selects which of Color filter or Color Pickup is to be used at [Detail] - [Color mode].
The default is use of Color filter.
Color filter
Color Pickup/Binary
Filtering
BGS level
Setup Item Setting value Description
Measurement mode Average (default value) Sets the method for calculating the edge width.
Maximum
Minimum
Color mode Filter mode
(default value)
Color filter processing improves the contrast of images so that
edges are detected.
Pickup mode Specify the color to measure to find the edge of that color.
Split size 1 to 99 (default value: 1)
Sets the calculation width when the Maximum/Minimum widths are
to be calculated. The Maximum or Minimum is calculated after the
measurement region is split up by the calculation width to find the
edge(s).
Color 1/2
Light
→
Dark (default value
) Selects the density change direction of the edge(s) to be
detected.
Dark → Light
Edge level 1/2 1 to 99
(default value: 50)
Sets the level of density change to be judged as an edge.
Noise level 1/2 0 to 255
(default value: 20)
Sets the level to be judged as noise.
When the difference between the minimum and maximum den-
sity values in the density region is at the noise level or lower, it
is judged that there are no edges. Set a higher value when
noise causes an edge to be detected by mistake.
Noise width 1/2 0 to 255
(default value: 0)
Sets the width to be judged as noise.
Set a higher value when noise causes an edge to be detected
by mistake.
Calibration OFF (default value)
Measurement results are output using the camera's coordinate values.
ON Measurement results are output using the coordinate value
converted by the calibration function.