Parker Hannifin S.p.A. Divisione S.B.C. user’s manual TWIN-N and SPD-N
139
PDO1 (tx/rx) object :
Realtime Mode (Pr31 = 15):
In the same way as for the SBCCAN protocol, a real-time mode has been implemented (operating
mode 15) which, for CANopen networks, uses PDO1 (rx/tx) for cyclical data exchange and the SYNC
message for synchronizing the position loops. The message COB-IDs are different from SBCCAN
execution for the purposes of compatibility with CANopen networks.
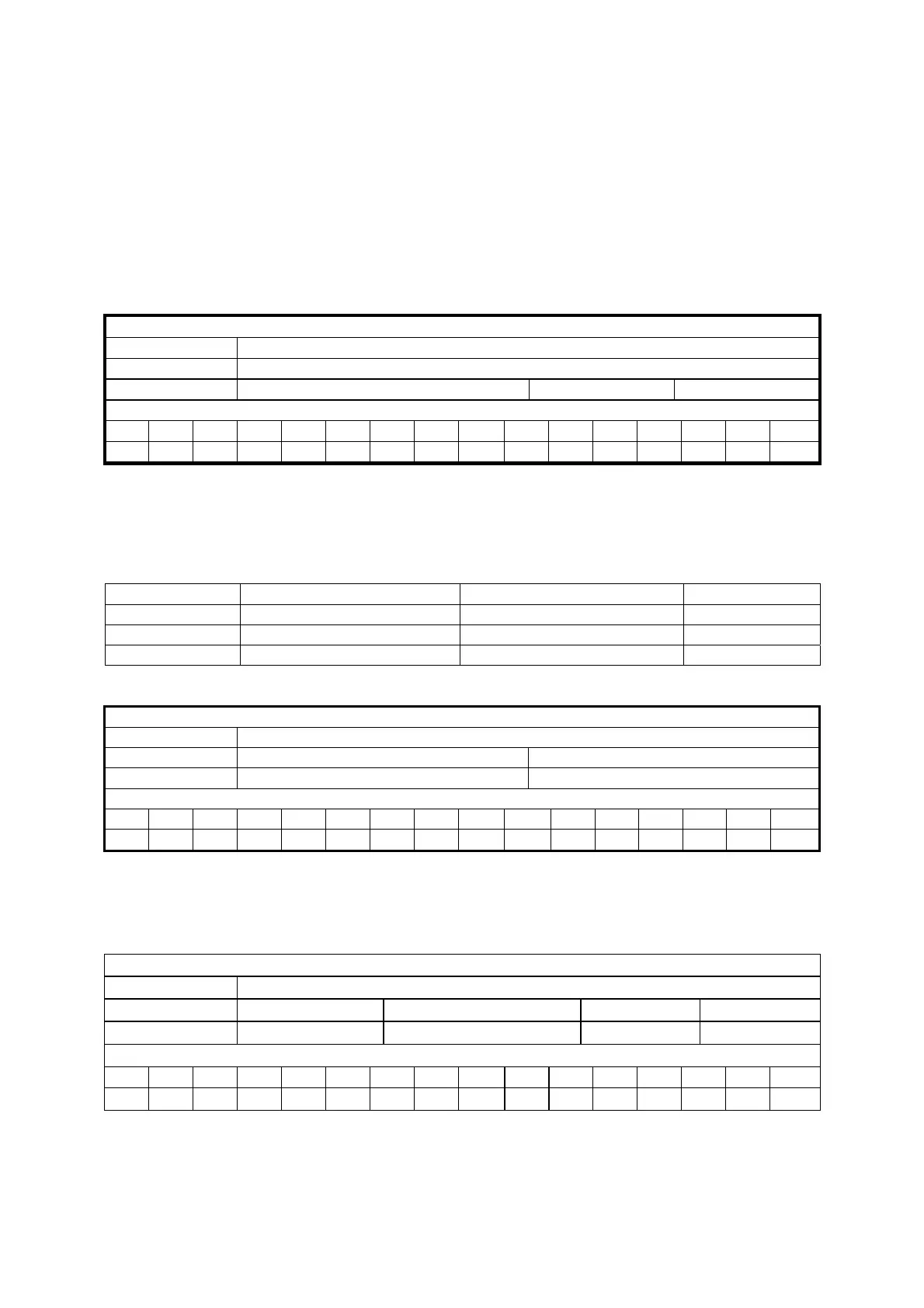
Cyclic message from master to drive (PDO1 rx)
Cyclic data
Data length
8/6/4 bytes
Field Name
Data
Contents
position ref. 32 bits speed ref. 16 bits Pr102
Identifier
ID2 ID1 ID0 - - - - - ID10 ID9 ID8 ID7 ID6 ID5 ID4 ID3
A2 A1 A0 X X X X X 0 1 0 0 A6 A5 A4 A3
A0:A6 Slave drive address (Pr49), valid values 1..127.
Pr102 is used as a command and must be managed by the pico-PLC.
Based on the length of the message, the data received is interpreted in the following way.
Data length
8 Position reference (4 byte) Speed reference (2 byte) Pr102 (2 byte)
6 Position reference (4 byte) Pr102 (2 byte)
4 Speed reference (2 byte) Pr102 (2 byte)
Synchronism message from master to drive
Synchronism message
Data length
0 bytes
Field Name
Contents
Identifier
ID2 ID1 ID0 - - - - - ID10 ID9 ID8 ID7 ID6 ID5 ID4 ID3
0 0 0 X X X X X 0 0 0 1 0 0 0 0
Upon receipt of the sync message, each drive activates the speed and position references and saves the
current motor position. If b150.2=1, the drive responds with a message “cyclic reply”.
Cyclic reply message from device to Master (PDO1 tx)
Cyclic reply
Data length
8 bytes
Field Name
Addr Data Status spare
Data
Pr49 (1 byte) motor position 32 bits Pr103(16bit) reserved
Identifier
ID2 ID1 ID0 - - - - - ID10 ID9 ID8 ID7 ID6 ID5 ID4 ID3
A2 A1 A0 X X X X X 0 0 1 1 A6 A5 A4 A3
NOTE: The other features of SBCCan are no more available in this release.
The use of CANopen involves the reduction of the number of the free parameter.
 Loading...
Loading...
