Wrist Camera Instruction Manual
7.3. Vision System Specifications
Accuracy
The accuracy of the vision system is as described in the table below and depends on the robot model used. It is valid for
the area where the calibration board was located during the calibration process.
Robot Model Accuracy
UR3 +/- 2mm
UR5 +/- 3mm
UR10 +/- 3mm
Fig. 7-3: Accuracy of the vision system.
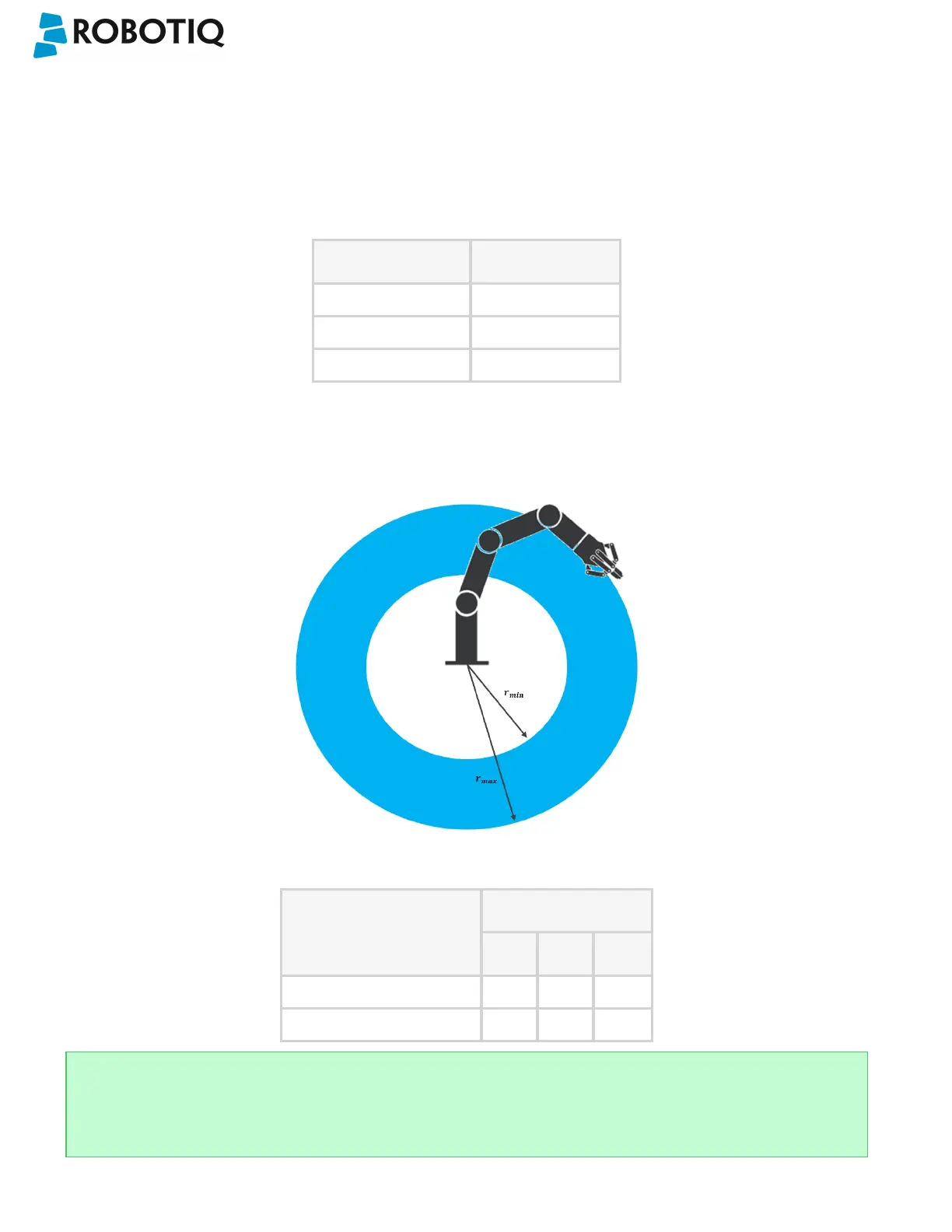
Calibration board position
Fig. 7-4: Calibration board position.
Specification Value
UR3 UR5 UR10
Minimum board distance (cm) 26 34 42
Maximum board distance (cm) 42 70 98
Tips
Snapshot Position will determine the field of view, notice that the calibration step position does not have to be the
same as Snapshot position. Thus, you can have a small field of view, then move back for calibration step.
©Robotiq inc. 2016-2018
97