50 Rockwell Automation Publication 2198-RM002A-EN-P - October 2017
Chapter 3 System Replacement Examples
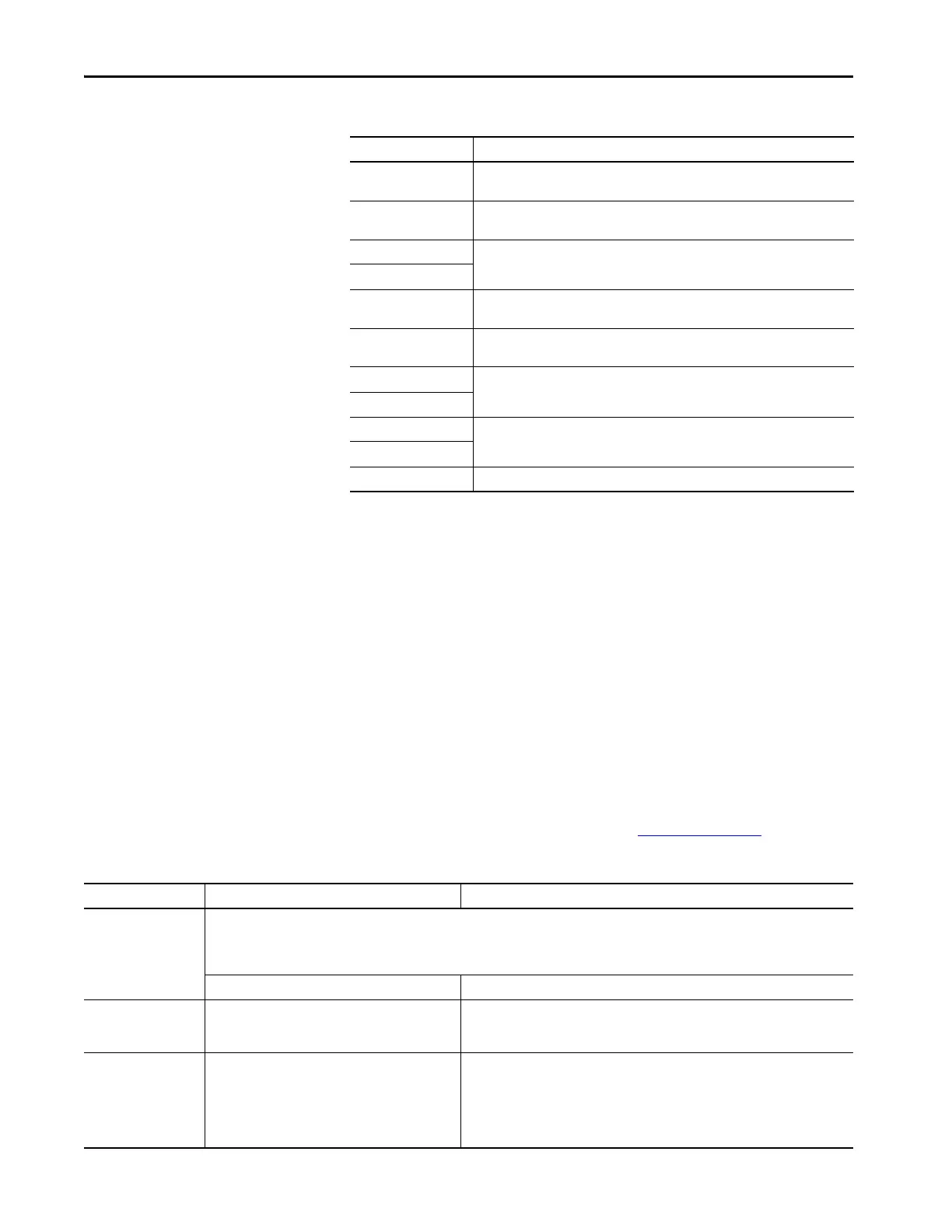
Table 19 - Kinetix 5700 Fault Code Summary
Tuning
Closed-loop servo systems require settings for the control-loop gain and filter
values to make sure that the load accurately follows the desired input-command
signal. The process of adjusting and refining the gain and filter configuration is
called tuning.
Tuningless features help you reduce commissioning time, maintain product
quality, sustain operation with lower downtime, and improve machine
performance.
For help tuning your axes, see the Tuningless Features for the Kinetix 5000
Servo Drive Family Quick Start, publication MOTION-QS001
.
Table 20 - Motion System Tuning
Fault Code Type
(1)
(2)
(1) Sxx refers to Standard exceptions.
(2) Mxx refers to Manufacturer-specific exceptions.
Description
FLT Sxx
Standard runtime axis exceptions. The exception can apply to an individual axis or to
all axes.
FLT Mxx
Manufacturer-specific runtime axis exception. The exception can apply to an individual
axis or to all axes.
INIT FLT Sxx
Exceptions that help prevent normal operation and occur during the initialization
process.
INIT FLT Mxx
NODE FLTxx
Exceptions that help prevent normal operation of the drive module and apply to the
entire module and affect all axes.
NODE ALARM xx
Exceptions that help prevent normal operation of the drive module, but do not result in
any action other than reporting the alarm to the controller.
INHIBIT Sxx
Conditions that help prevent normal operation and indicate that the drive module is
prevented from being enabled.
INHIBIT Mxx
ALARM Sxx
An underlying exception condition that does not result in any action other than
reporting the alarm to the controller.
ALARM Mxx
SAFE FLTxx Exception that is generated by a fault condition that is detected in the safety function.
Tuning Methods Kinetix 6000 Drives Kinetix 5700 Drives
Load Observer
• Operates in real-time
• Estimates and compensate for mechanical load inertia on motor
• Controls motor as if unloaded
• Compensates for mechanical variations in system such as changing loads, compliance, and machine wear over time
Configure Kinetix 6000 drives via message instructions Configure Kinetix 5700 drives in Logix Designer>Axis Properties via Add-on Profile
Adaptive Tuning with
Tracking Notch Filter
Adaptive tuning feature is not supported.
• Operates in real-time
• Measures mechanical resonances and dynamically sets the notch filter frequency to
mitigate the resonances
Adaptive Tuning with
Gain Stabilization
Adaptive tuning feature is not supported.
• Enables and tunes the low-pass filter to suppress resonances if any are identified
above the low-frequency limit (when there are more resonances in the system than
notch filters in the drive).
• Adjusts the torque low-pass filter, the control loop gains, and the load observer
bandwidth from the current values until the identified HF resonances are suppressed
or until a LF resonance or instability is attenuated enough to make the system stable.

 Loading...
Loading...









