Instruction Manual for AS380 Series Elevator Integrated Drive Controller
Chapter 7 Parameter Table of Integrated Drive Controller
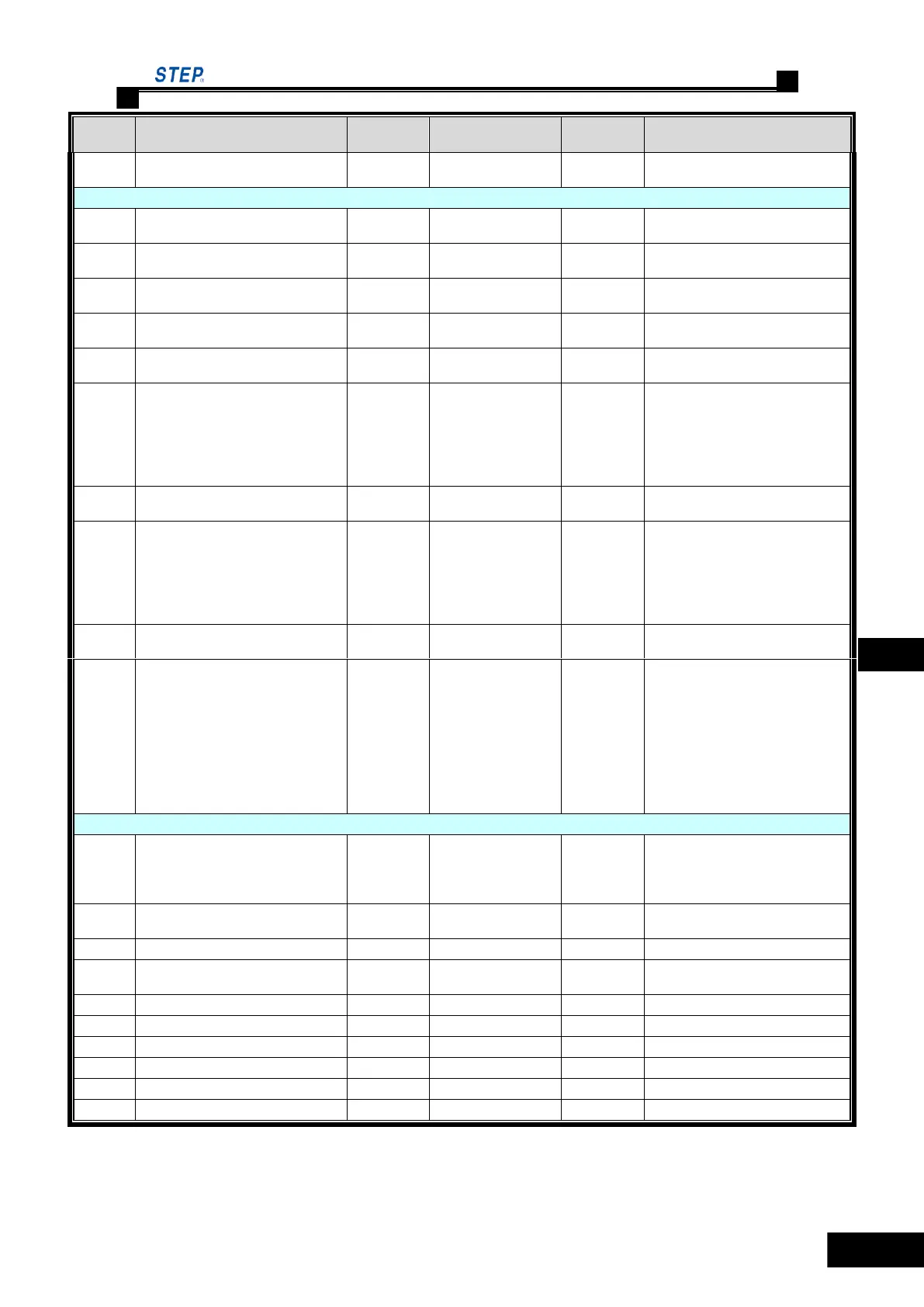
Set the max power output,
generally do not need to change
When F245=5, F246~F255 have the following meanings
Stator resistor of asynchronous
motor
Rotor resistor of asynchronous
motor
Stator inductor of asynchronous
motor
Rotor inductor of asynchronous
motor
Mutual inductor of asynchronous
motor
Motor low-speed overcurrent
threshold
Motor stop and motor low-speed
onvercurrent reported in case that
the motor speed is lower than
20% of nominal speed, and the
value and time duration of current
surpass those of F252.
Low-speed overcurrent time
Duration of motor low-speed
overcurrent
Motor high-speed overcurrent
threshold
Motor stop and motor high-speed
overcurrent reported in case that
the motor speed is higher than
20% of nominal speed, and the
value and time duration of current
surpass those of F2524
High-speed overcurrent time
Time duration of motor
high-speed overcurrent
Frequency dividing coefficient of
encoder ( PG card required)
0: ( no frequency dividing), 1:( 2
frequency dividing), 2: (4
frequency dividing),3:(8
frequency dividing),
4: (16 frequency dividing),5 (32
frequency dividing),6:(64
frequency dividing), 7: (128
frequency dividing)
Note: ( PG card required)
When F245=6, F246~F255 have the following meanings
Synchronous motor study angle or
not when power on
Determine whether synchronous
motor conduct angle self-study or
not when power on , 0 for no
study, 1 for study
Current gain when self-study
Current gain when synchronous
motor conduct angle self-study
Zero servo process current loop
gain
Zero servo process current loop
gain
6616:open anti-slipping function
 Loading...
Loading...