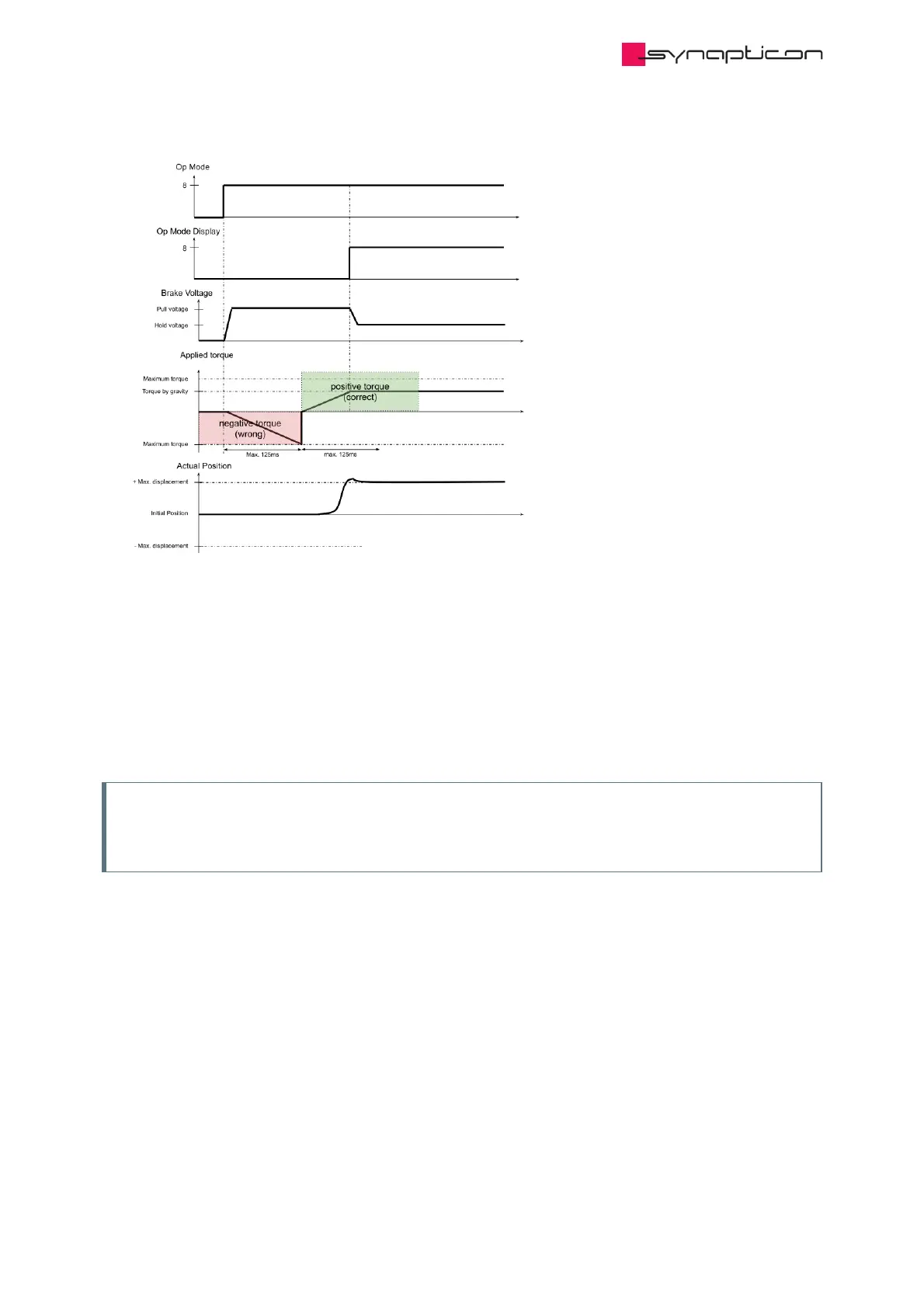
The brake controller raises the torque progressively until it reaches the maximum displacement threshold. If it
reaches the maximum torque threshold first, it rises the torque again in the opposite direction. When the
torque is high enough to compensate for gravity, the load is lifted until the position reaches the threshold
value, the torque stays to a holding torque value and the brake will be disengaged. After the release delay, the
brake voltage is driven to “Brake hold voltage” and Op Mode display is set to Op Mode. The controller is then
enabled. To use the pin-brake mode please select the correct “Release strategy” in the brake configuration
section in OBLAC Drives commissioning software, or via direct object dictionary access.
Note
The brake release is an open loop system. After the brake pull time it is assumed that releasing was
successful and the hold voltage is applied.
 Loading...
Loading...

