3.1.8.3.1.2 Procedure
3.1.8.3.1.2.1 Prerequisites
An incremental encoder must be used, HALL sensors are not accurate enough. The minimum resolution
required is 1024 counts per revolution (cpr), it is recommended to use a resolution of 4096 cpr or higher.
The motor and the drive should be properly sized. In particular, the motor’s rated current should be at least
20 % - 30 % of the drive’s rated current.
For executing the cogging torque recording the motor must not be mechanically blocked and ideally must
have no load attached.
The motor is fully functional and the drive is properly configured.
The System identification and position auto-tuning procedures were successfully executed with the current
setup. The position control mode is fully functional.
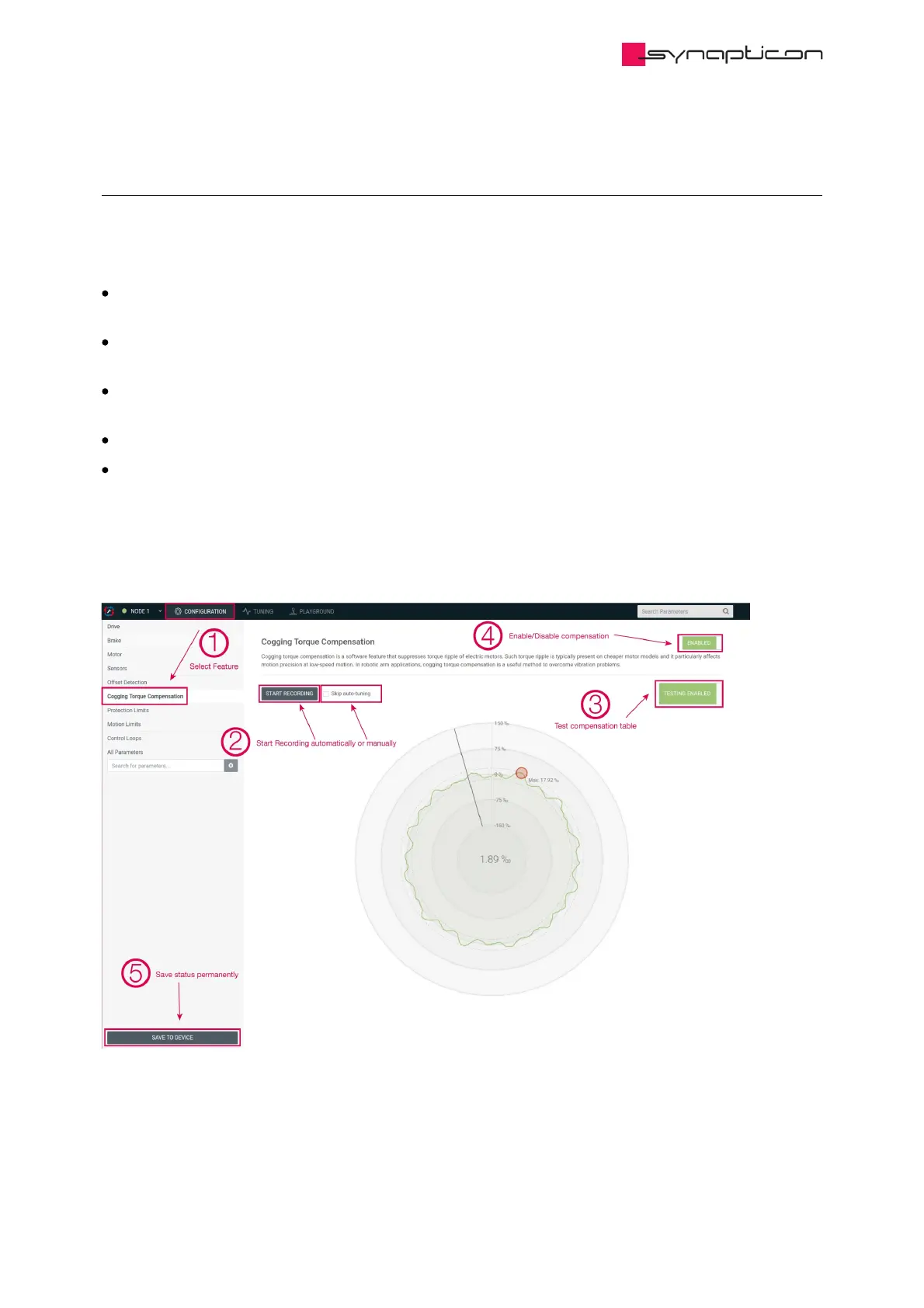
3.1.8.3.1.2.2 Overview of the GUI
 Loading...
Loading...

