4.2.2.3.2 Steps of Operation
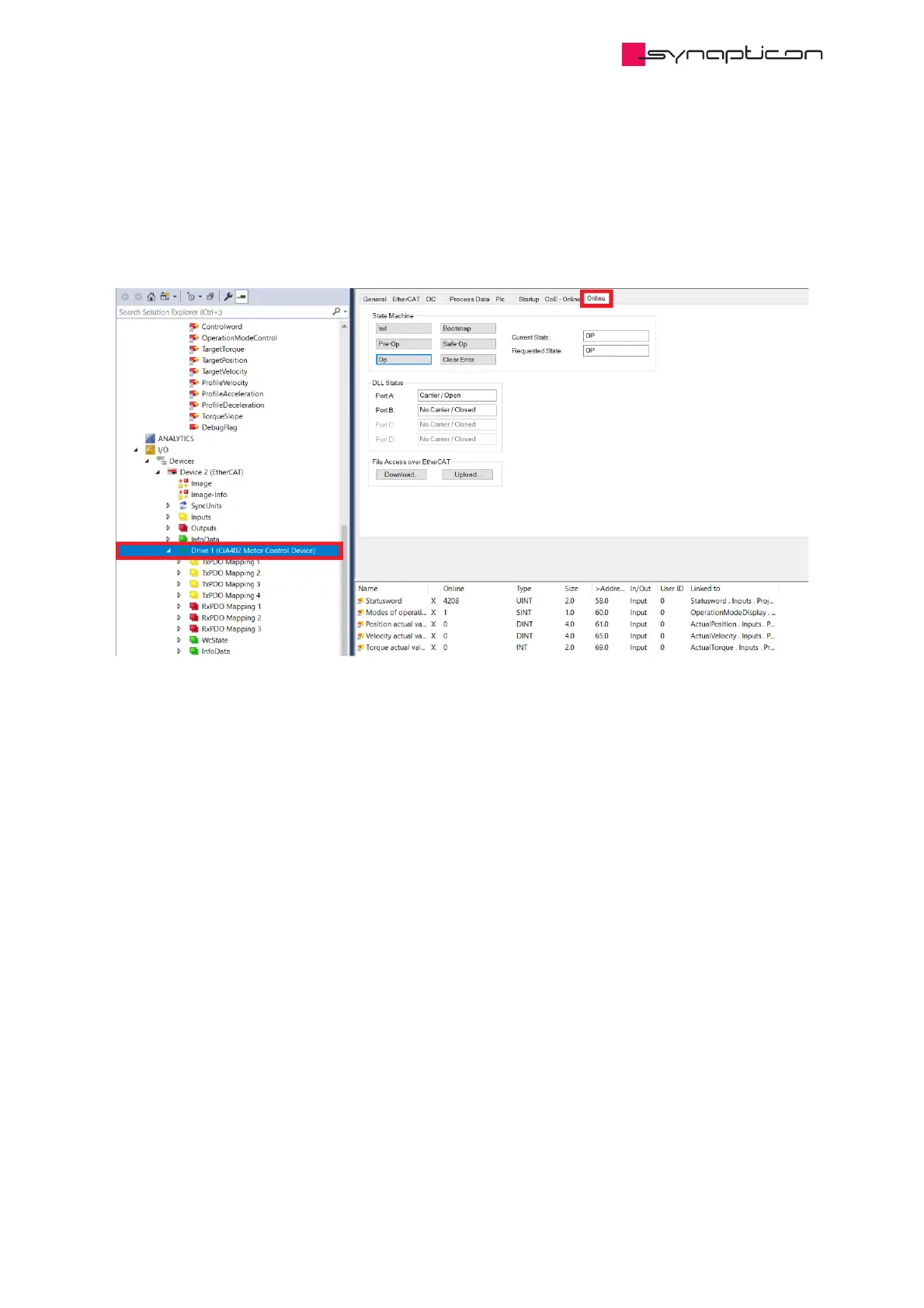
1. In TwinCAT 3, double-click the servo drive under “I/O” - “Devices”, as shown in Figure 5, to access the slave
operations. Click the tab “Online” for state machine operations and FOE access.
Figure 5: Accessing slave operation in TwinCAT
3
2. Switch the EtherCAT state of the drive to BOOT by clicking “Bootstrap”, this allows the following operations.
3. Click “Download” under “File Access over EtherCAT”, switch to browse “All Files”, and choose the
configuration file to be uploaded, as shown in Figure 6.
 Loading...
Loading...

