3.1.8.3.9.5 Position and velocity feedback low-pass
filters
These filters are used to cope with distorted feedback signals that occur in the control loop. Typical distortions
to consider are:
Encoder noise in the position signal - optical and good magnetic encoders usually have a low amplitude. 1st
order filters with a 1000 Hz
[1]
cutoff are a good starting point.
Noise in the velocity signal - noise from the position signal is amplified due to differentiation. 1st order
filters with a 500 Hz * cutoff are a good starting point.
Velocity signal distortions due to encoder nonlinearity. These distortions typically appear with a frequency
of 1 (dominant), 2 and 4 ꞏ motor speed [revolutions per seconds].
[1]
The specified frequencies are just initial values that will not interrupt the motion control. Lower values
should be found and set see A practical guide to low-pass filter design
Note
Setting the velocity filter more rejective than the position filter is one possible approach, see A practical
guide to low-pass filter design for details how to set up filter parameters.
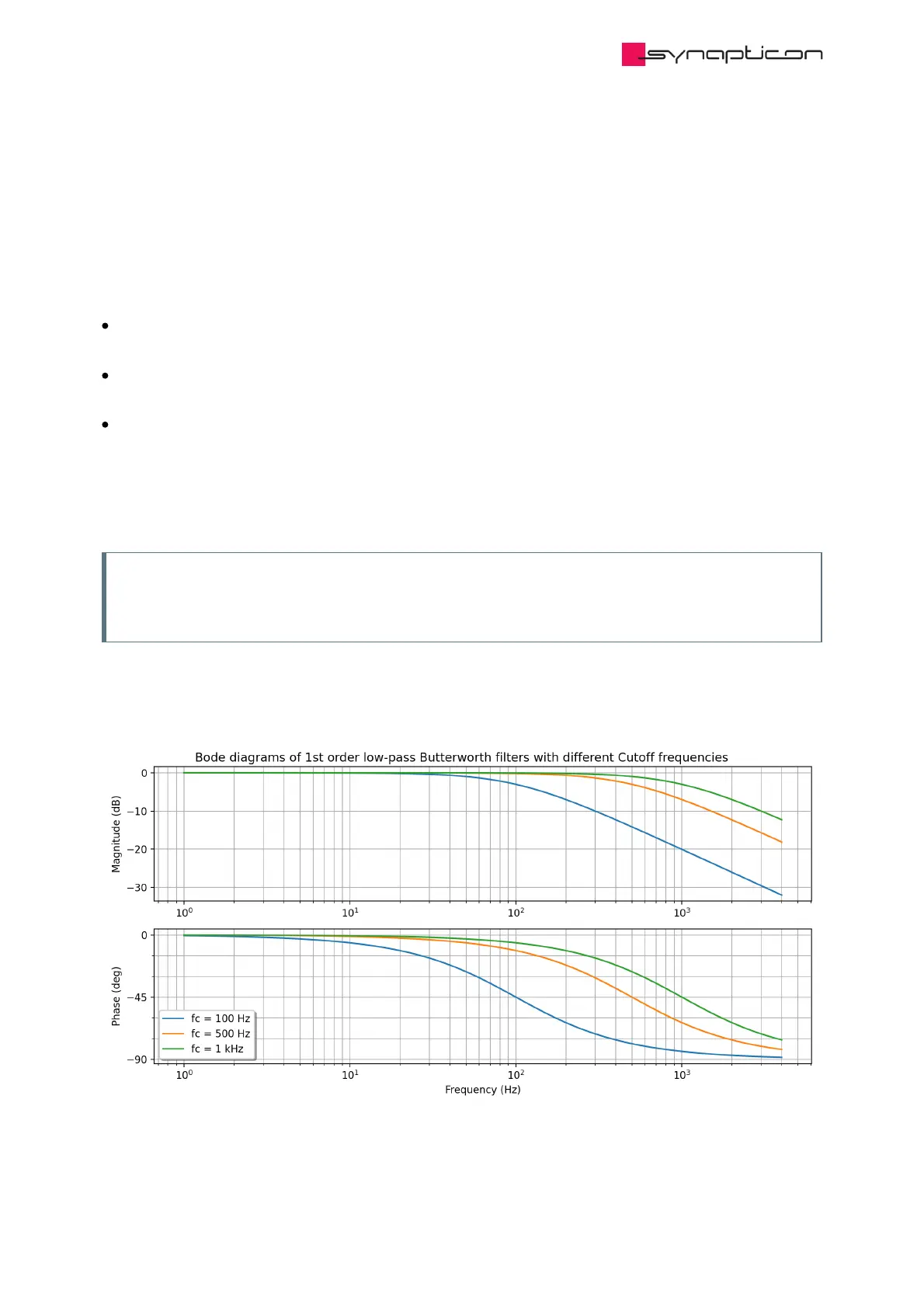
The main parameter of the Low-pass filters is the cutoff frequency which determines the frequency where the
filter starts to attenuate the signal to -3 dB of the amplitude. After that frequency, a roll-off region starts that
further attenuates the signal.
 Loading...
Loading...

